USART 基本实现
以 USART1 为例,开启 USART 大致需要四步:
- 在 RCC 内启用 USART1 所需要的时钟
- 为 RX 和 TX Pins 选用 复用功能 ,在参考手册里会有定义。
- 通过 BRR 寄存器设置波特率
- 配置 RX,TX
在 RCC 使能所需时钟
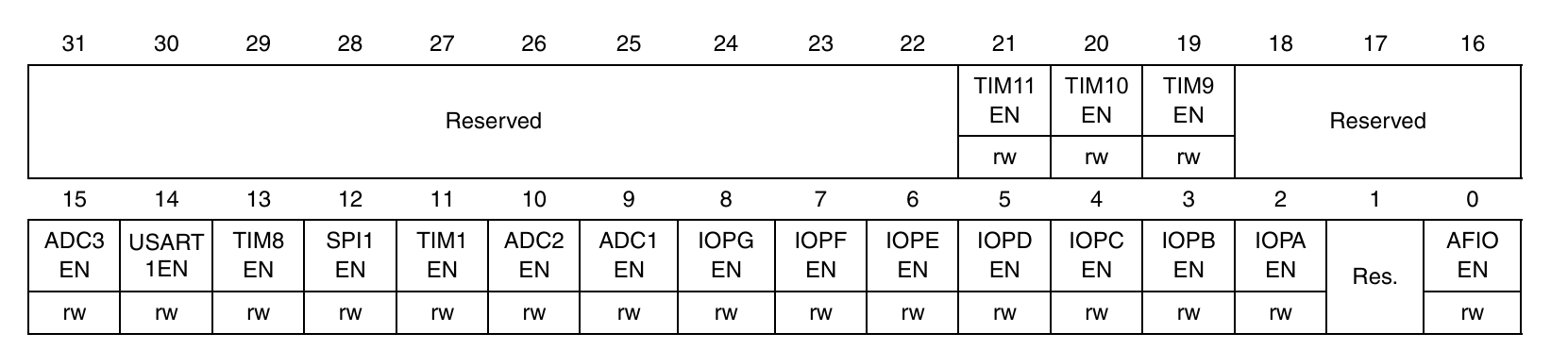
由参考手册可知,我们需要使能的 USART1EN 、 IOPAEN 和 AFIOEN 都在 APB2ENR 寄存器中,所以直接设置这个寄存器即可。
1
2
3
4
5
6
| // Enable AFIOEN
RCC->APB2ENR |= RCC_APB2ENR_AFIOEN;
// Enable IOPAEN
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
// Enable USART1EN
RCC->APB2ENR |= RCC_APB2ENR_USART1EN;
|
输出引脚配置
之前接触 GPIO CRH 与 CRL 寄存器的时候,应该注意到过 CNF 里有以下内容:
1
2
3
4
5
6
7
8
9
10
11
12
13
| In input mode (MODE[1:0]=00):
- 00: Analog mode
- 01: Floating input (reset state)
- 10: Input with pull-up / pull-down
- 11: Reserved
In output mode (MODE[1:0] > 00):
- 00: General purpose output push-pull
- 01: General purpose output Open-drain
- 10: Alternate function output Push-pull
- 11: Alternate function output Open-drain
|
这里就涉及到 Alternate function (复用功能)了。比如说,USART 就是一种复用功能,我们要使用它,就需要对他的引脚进行配置。
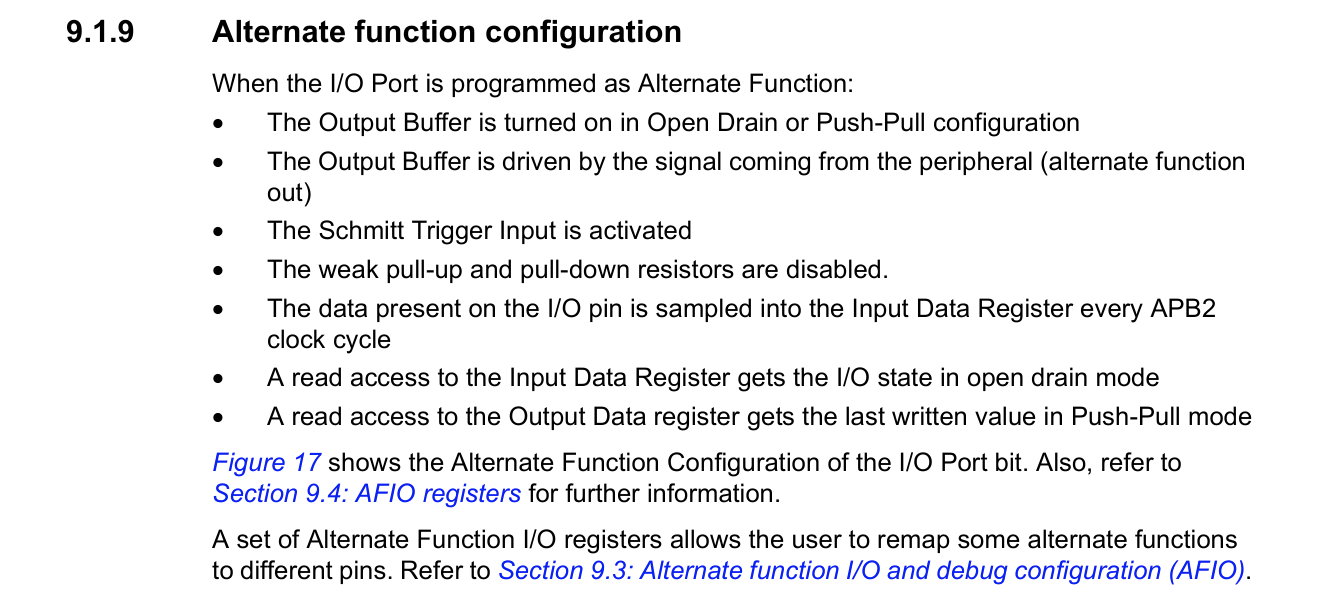
上面是参考手册对于复用功能配置的介绍,下面是从参考手册中截取的 USART 所需要的配置。
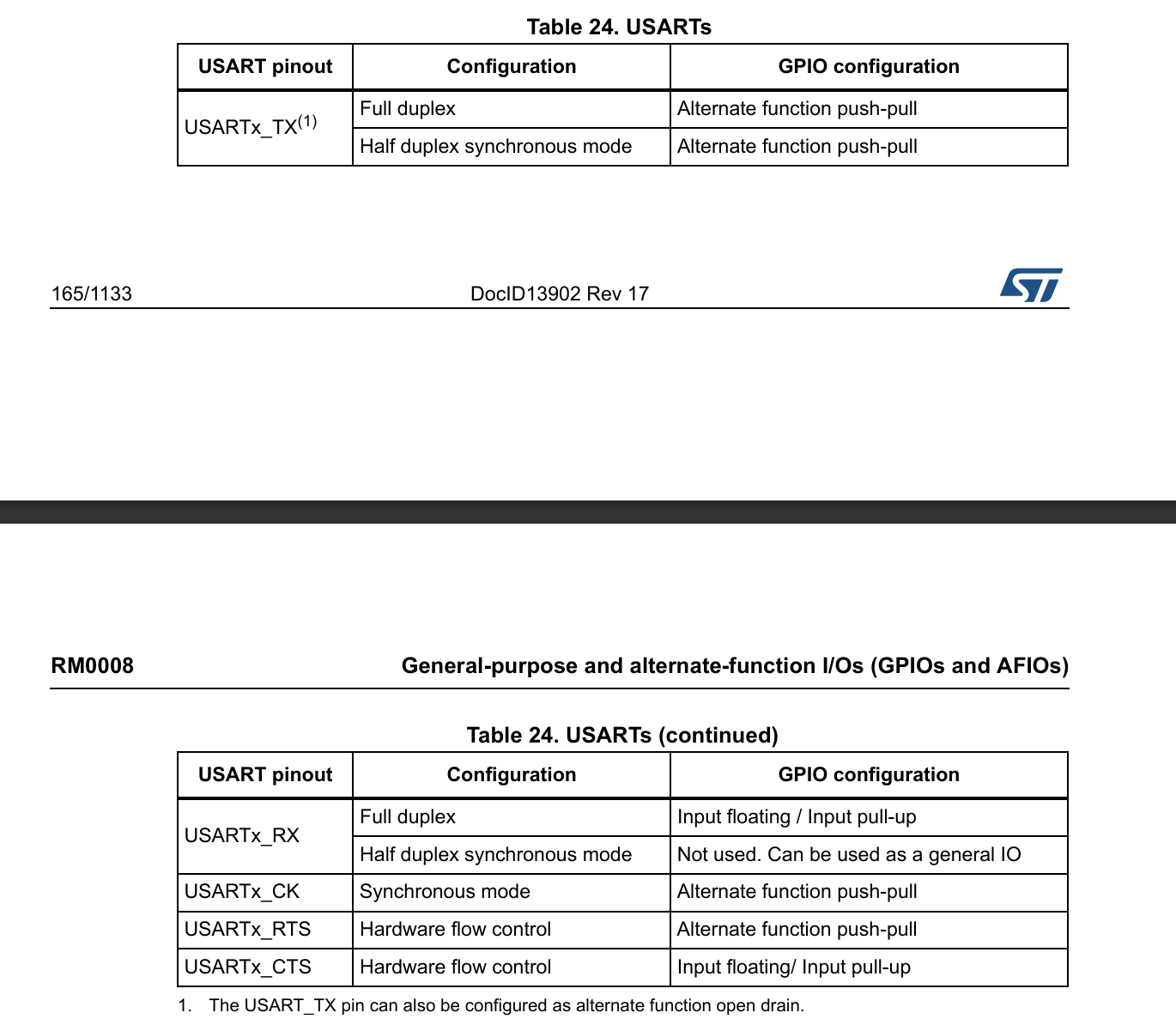
可以看到,每个 pinout 都对应了一个 GPIO configuration。你说得对,但是我们需要用到 RX 和 TX 引脚,去哪里找这些引脚都是什么呢?这个可以在参考手册的 AF remap and debug I/O configuration register (AFIO_MAPR) 处寻找,这里给出了所有复用功能的引脚,以及可以软件设置的 remap。
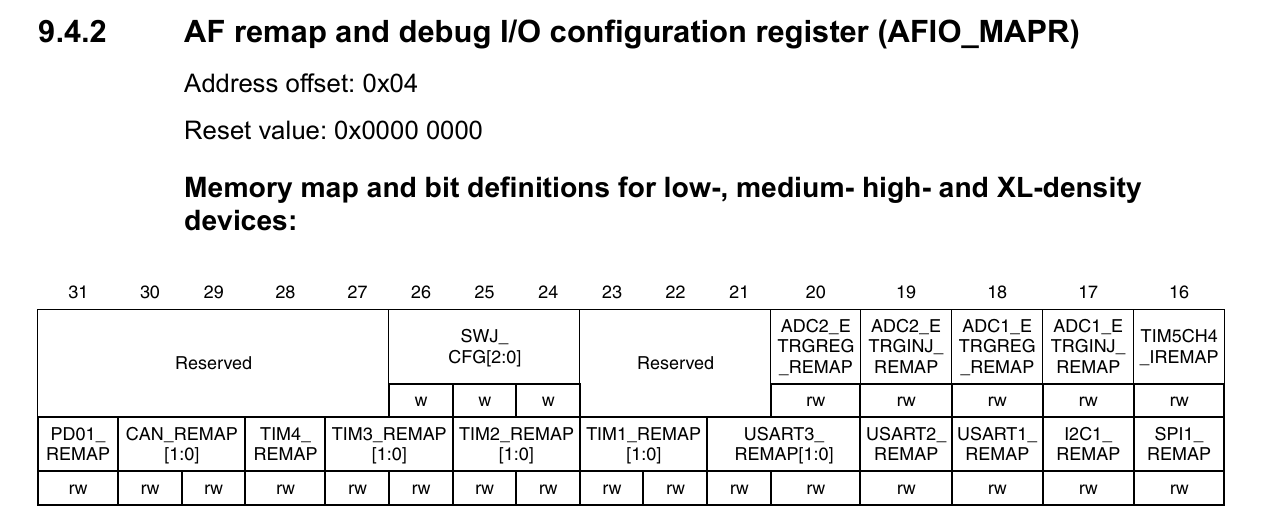

上面是 AFIO_MAPR 的寄存器结构,以及他下面写的的 USART1 Remapping。Remap 就是重新映射的意思,这里就是说可以通过这个寄存器把原本 TX->PA9, RX->PA10 的 USART1 引脚给重新映射到 TX/PB6, RX/PB7 上,相当于给设计电路时提供了更多可选的选择。至此,我们便知道了设置 USART1 GPIO 输出的方法。
1
2
3
4
5
6
7
8
9
10
11
12
| /* Configure GPIO pins for USART1 */
// PA9 (TX) - Alternate function push-pull (50MHz)
// 清除PA9配置位 (CRH bits 7:4)
GPIOA->CRH &= ~(0xF << 4);
// 设置PA9为复用推挽输出,50MHz (1011)
GPIOA->CRH |= (0xB << 4);
// PA10 (RX) - Input floating / Input pull-up
// 清除PA10配置位 (CRH bits 11:8)
GPIOA->CRH &= ~(0xF << 8);
// 设置PA10为浮空输入 (0100)
GPIOA->CRH |= (0x4 << 8);
|
设置波特率
下面给出的是分数波特率的计算公式、常见的编码波特率误码率的计算、BRR寄存器的结构:
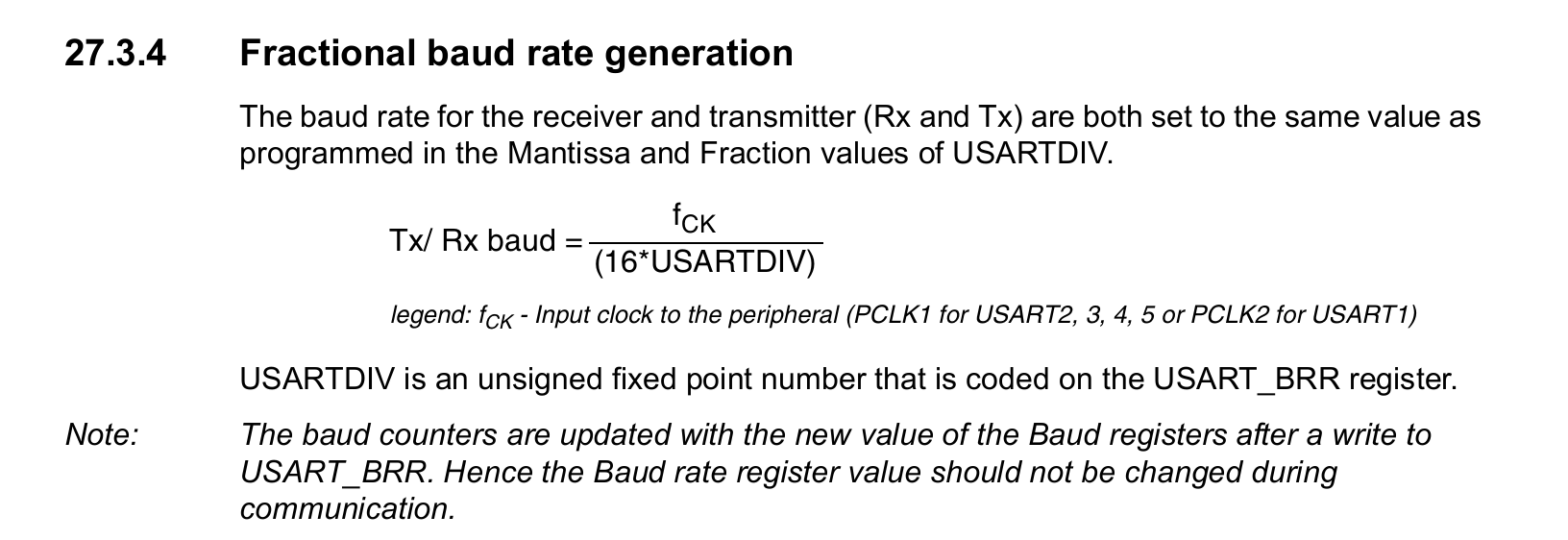
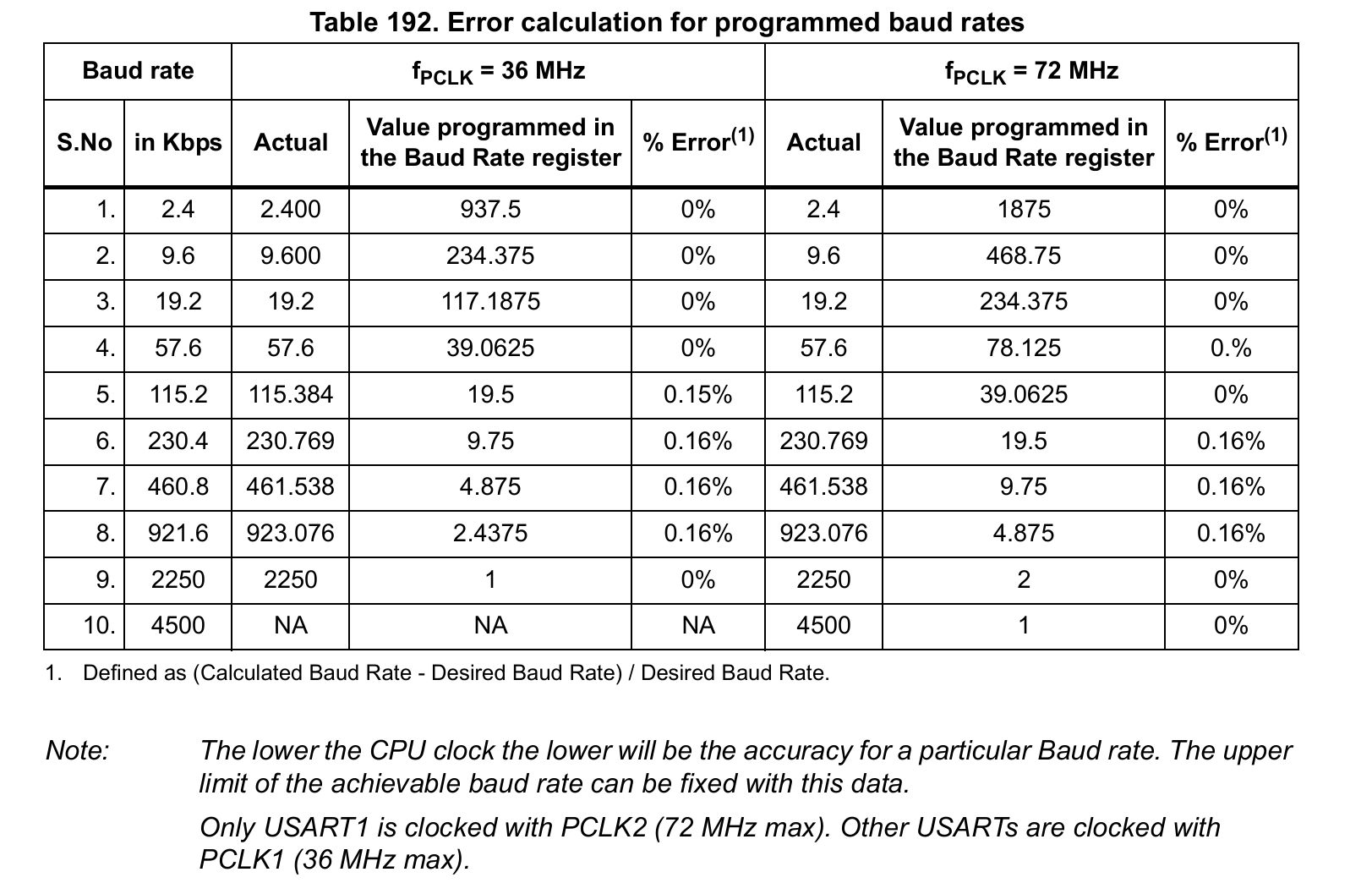
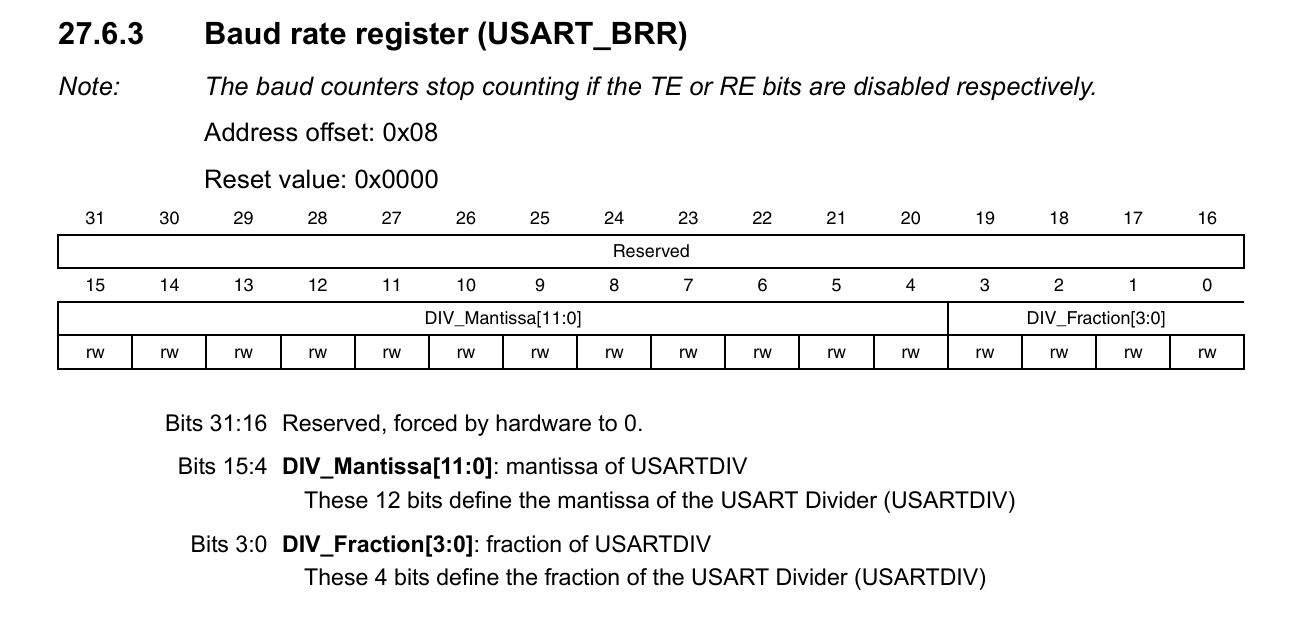
我们要设置波特率,就需要对 BRR 寄存器进行设置。由图可以看出,BRR 寄存器的前16位分为 12 位整数部分和 4 位小数部分。由第二幅图片,我们可以直接找到需要的频率对应的编码波特率,比如 对于 115.2Kbps ,我们要设置为 39.0625,那么就把整数部分左移四位,再与小数部分*16进行或运算。
1
2
3
4
| // 配置波特率
// 115200 -> 39.0625
// 小数部分 = 0.0625 * 16 = 1
USART1->BRR = (39 << 4) | 1;
|
注意:对BRR寄存器的修改会直接应用到RX和TX上,所以请不要在发送与接收数据的时候修改。
TX/RX 配置
根据参考手册,Transmitter 与 Receiver 的工作流程如下:
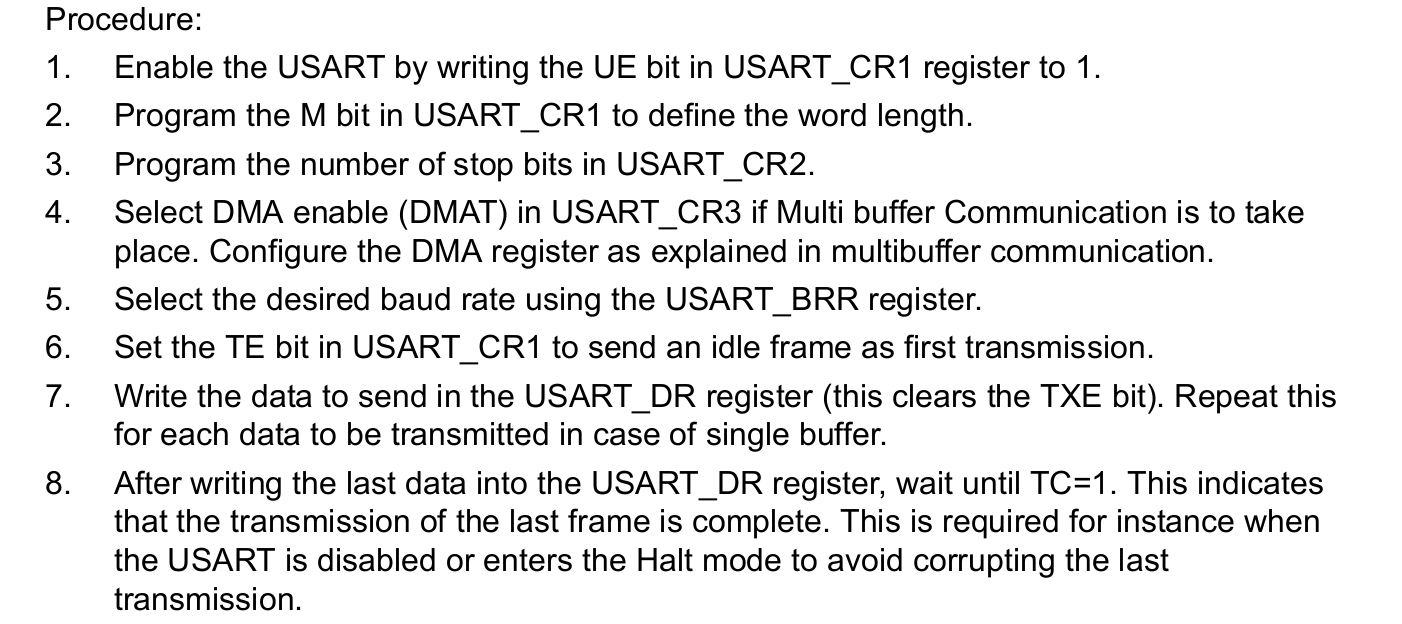
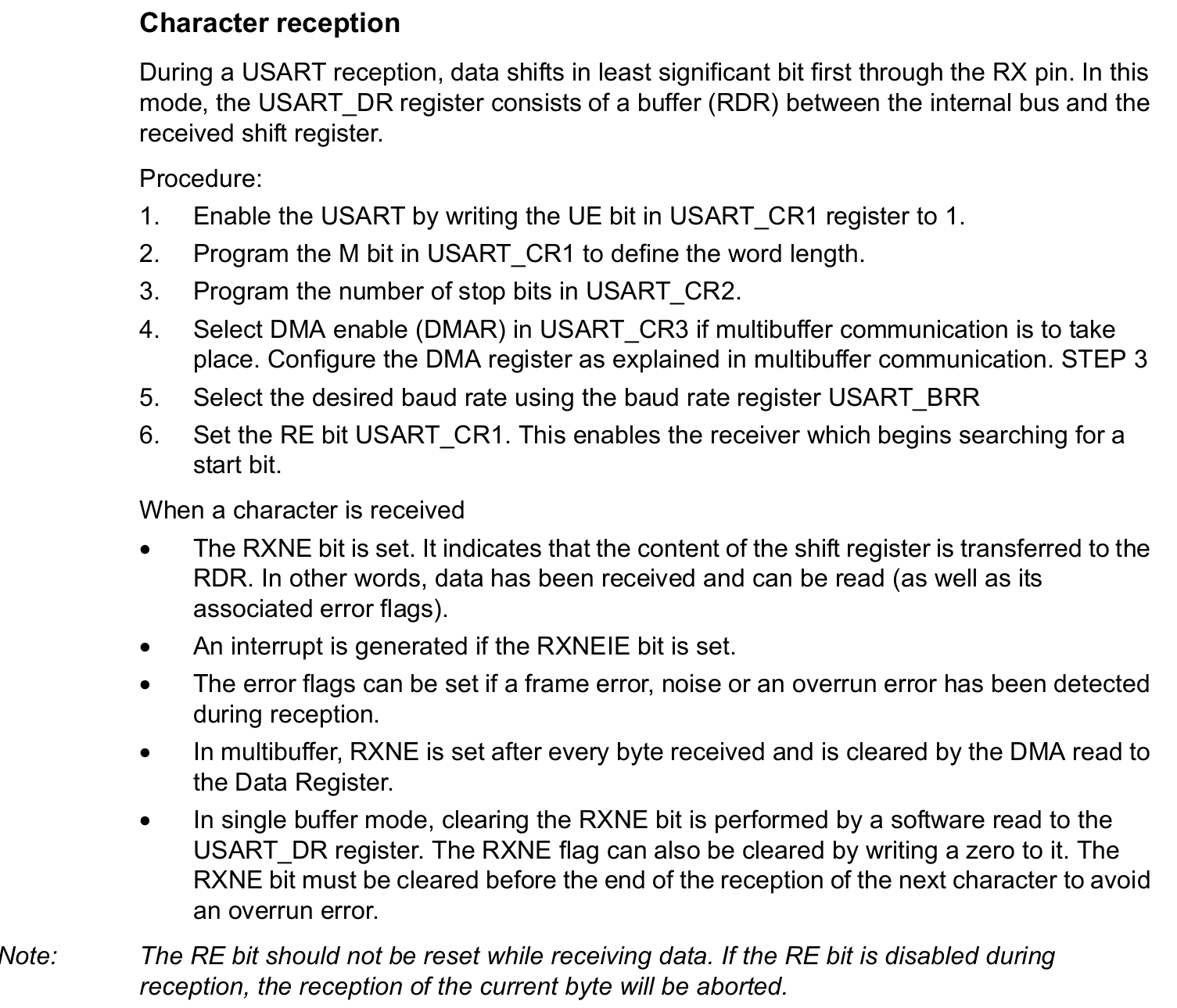
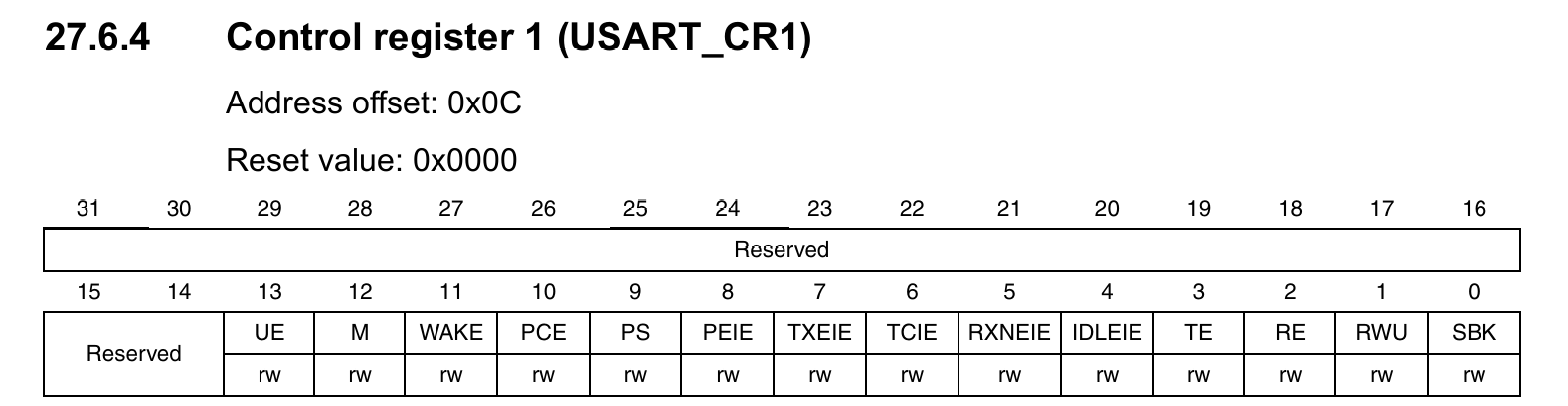
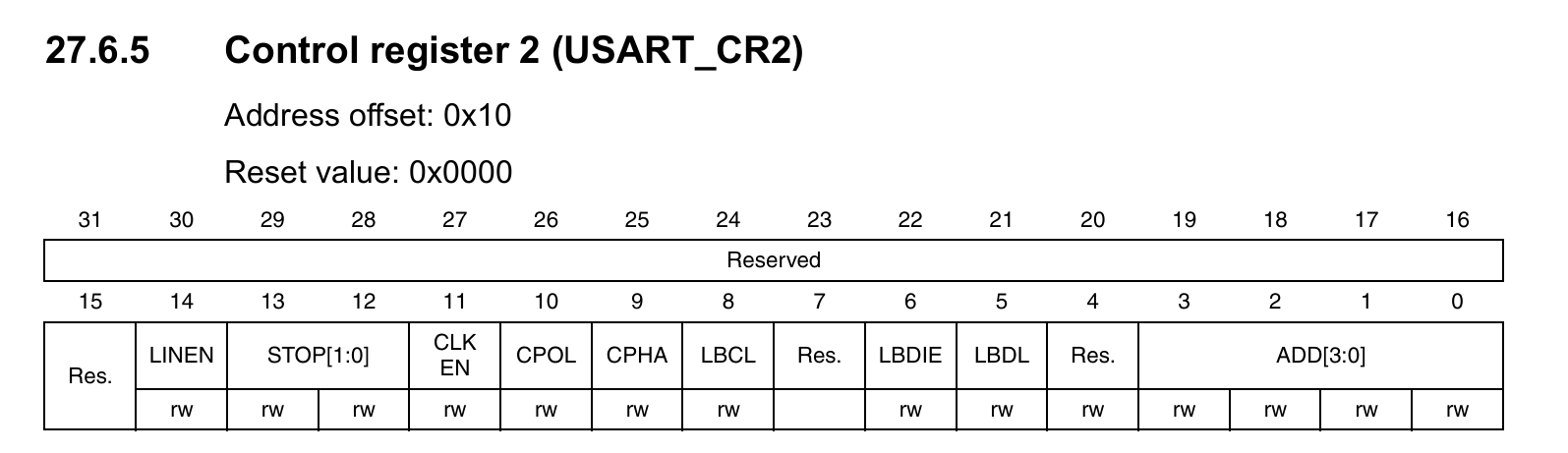
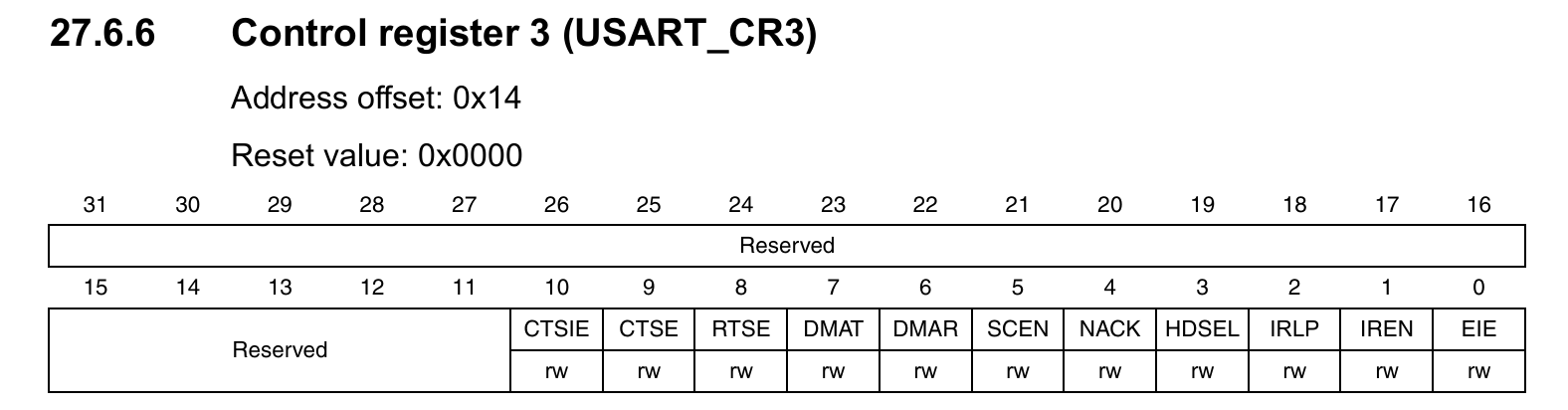
由这些步骤可见,我们需要访问 CR1,CR2,CR3,DR 这些寄存器,我们在这里先简单给出对应几个寄存器的结构:
由此,我们可以得到配置过程:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
| // 配置控制寄存器
// 先清除所有配置,然后设置需要的位
USART1->CR1 = 0;
USART1->CR2 = 0;
USART1->CR3 = 0;
// CR1配置:
// UE (bit 13): USART Enable - 最后设置
// M (bit 12): 0 = 8 data bits
// PCE (bit 10): 0 = No parity
// TE (bit 3): Transmitter enable
// RE (bit 2): Receiver enable
USART1->CR1 = USART_CR1_TE | USART_CR1_RE;
// CR2配置:
// STOP[13:12]: 00 = 1 stop bit (默认值)
// 前面已经被置零了,无需设置
// 最后启用USART
USART1->CR1 |= USART_CR1_UE;
|
实现收发
这里提出一种收发方式。在这之前,我们先回顾一下 TX 和 RX 的工作流程(在上面),并关注一下 USART_SR:
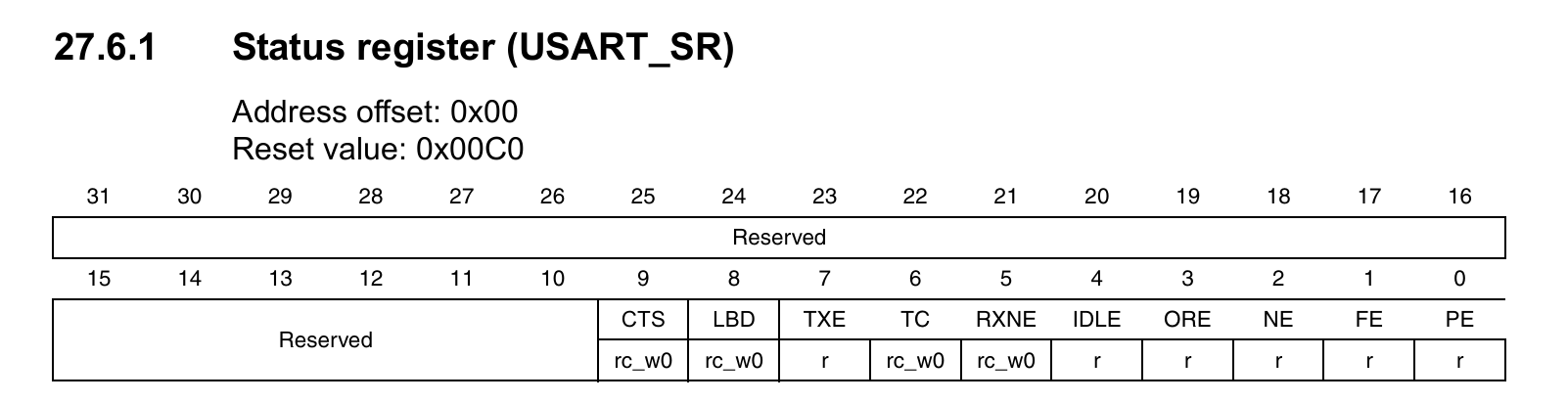
在 TX 的工作流程中,有提到:
- 把要发送的数据写进USART_DR寄存器(此动作清除 TXE 位)。在只有一个缓冲器的情况下,对每个待发送的数据重复步骤7。
- 在USART_DR寄存器中写入最后一个数据后,要等待TC=1,它表示最后一个数据帧的传输结束。当需要关闭USART或需要进入停机模式之前,需要确认传输结束,避免破坏最后一次传输。
所以,我们就可以写出下面的发函数:
1
2
3
4
5
6
7
8
9
| uint8_t usart1_send(void* buf, uint32_t len) {
uint8_t* data = (uint8_t*)buf;
for (uint32_t i = 0; i < len; i++) {
while (!(USART1->SR & USART_SR_TXE)) {}
USART1->DR = data[i];
}
while (!(USART1->SR & USART_SR_TC)) {}
return 0;
}
|
对于接收,这里提供的是一个比较简陋的接收方式,通过阻塞等待数据读入,实际使用应该没人会这么写(
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| uint8_t usart1_receive(void* buf) {
uint8_t* data = (uint8_t*)buf;
volatile uint32_t timeout = 100;
// 等待接收数据寄存器非空
while ( !(USART1->SR & USART_SR_RXNE) && timeout > 0 ) {
timeout--;
}
if ( USART1->SR & USART_SR_RXNE )
*data = (uint8_t)(USART1->DR & 0xFF);
else
return 1;
return 0;
}
|
一般来说,我们设计的是接收一个数据, 触发中断,然后把数据发回来。这种处理方式是没有缓冲的,当数量太大的时候,亦或者当数据接收太快的时候,我们来不及处理已经收到的数据,那么,当再次收到数据的时候,就会将之前还未处理的数据覆盖掉。那么就会出现丢包的现象了,对我们的程序是一个致命的问题。所以,我们一般会设计一个缓冲区,在有数据可以读入的时候写入缓冲区内,在缓冲区内读取数据。
CMSIS Driver 实现
初始化
启用以下两个组件即可使用 CMSIS 提供的 USART 驱动:
1
2
| - component: ARM::CMSIS Driver:USART:Custom
- component: Keil::CMSIS Driver:USART
|
同时,需要在 RTE_Device.h 中启用需要的 USART 设备,比如启用 USART1 :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| // <e> USART1 (Universal synchronous asynchronous receiver transmitter)
// <i> Configuration settings for Driver_USART1 in component ::CMSIS Driver:USART
#define RTE_USART1 1
// <o> USART1_TX Pin <0=>Not Used <1=>PA9
#define RTE_USART1_TX_PORT_ID_DEF 1
#if (RTE_USART1_TX_PORT_ID_DEF == 0)
#define RTE_USART1_TX_DEF 0
#elif (RTE_USART1_TX_PORT_ID_DEF == 1)
#define RTE_USART1_TX_DEF 1
#define RTE_USART1_TX_PORT_DEF GPIOA
#define RTE_USART1_TX_BIT_DEF 9
#else
#error "Invalid USART1_TX Pin Configuration!"
#endif
// <o> USART1_RX Pin <0=>Not Used <1=>PA10
#define RTE_USART1_RX_PORT_ID_DEF 1
#if (RTE_USART1_RX_PORT_ID_DEF == 0)
#define RTE_USART1_RX_DEF 0
#elif (RTE_USART1_RX_PORT_ID_DEF == 1)
#define RTE_USART1_RX_DEF 1
#define RTE_USART1_RX_PORT_DEF GPIOA
#define RTE_USART1_RX_BIT_DEF 10
#else
#error "Invalid USART1_RX Pin Configuration!"
#endif
|
之后,可以这样初始化 USART1:
1
2
3
4
5
6
7
8
9
10
11
12
13
| extern ARM_DRIVER_USART Driver_USART1;
void USART1_Event_Callback(uint32_t event) {}
void USART1_Init() {
Driver_USART1.Initialize(USART1_Event_Callback);
Driver_USART1.PowerControl(ARM_POWER_FULL);
Driver_USART1.Control(ARM_USART_MODE_ASYNCHRONOUS |
ARM_USART_DATA_BITS_8 |
ARM_USART_PARITY_NONE |
ARM_USART_STOP_BITS_1 |
ARM_USART_FLOW_CONTROL_NONE, 115200);
Driver_USART1.Control(ARM_USART_CONTROL_TX, 1);
Driver_USART1.Control(ARM_USART_CONTROL_RX, 1);
}
|
发送数据
1
2
3
| const char *msg = "Hello From Driver USART1.\n";
Driver_USART1.Send( msg, strlen(msg) );
while (Driver_USART1.GetStatus().tx_busy);
|
接收数据
我们来着重讲一下 CMSIS Driver 中接收的实现。我们要用到的核心代码是这样子的:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| // 缓冲区
static uint8_t rx_buffer[256];
static volatile bool rx_complete = false;
static volatile uint32_t rx_count = 0;
// 回调函数
void USART1_Event_Callback(uint32_t event) {
if (event & ARM_USART_EVENT_RECEIVE_COMPLETE) {
// 接收到完整的256字节
rx_complete = true;
rx_count = 256;
// 停止接收
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0);
}
if (event & ARM_USART_EVENT_RX_TIMEOUT) {
// IDLE检测到,获取实际接收的字节数
rx_count = Driver_USART1.GetRxCount();
rx_complete = true;
// 停止接收
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0);
}
}
// 启动接收模式
int32_t result = Driver_USART1.Receive(rx_buffer, 256);
// 停止接收
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0);
|
个人理解的这个 USART 的接收流程为
int32_t result = Driver_USART1.Receive(rx_buffer, 256); 启用接收模式,开启后会开始接收数据。这里指定了最多接收的长度。- 当接收到数据时,会不断将收到的数据写入 buffer。
- 当数据接收完成时,会触发回调函数(在初始化时指定)。回调函数带有一个参数 event ,可以通过这个 event 判断是什么事件。
- 目前会触发的事件一般是这两类:接收完、空闲。接收完是指已经接收到指定大小的数据了;而空闲是指对方已经发送完连续的数据,但不够指定的大小(数据传送都是连续的,中间不会存在空闲位置,所以当连接空闲时就是对方已经发送完数据了)。这时,我们可以使用
Driver_USART1.GetRxCount() 获取最后接收到了多少数据。 - 在每一次接收数据结束后,应当停止接收,通过
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0); 实现。如果不进行停止接收,那么下一次接收就无法开始。
具体来说, Driver_USART1.Receive() 是通过中断来实现的,在调用这个函数时,它会开启 CR1 的 RXNEIE 和 IDLEIE,在接收到数据或空闲时产生中断。 CMSIS Driver 在内部实现了一个 USART_IRQHandler ,他大致的工作流程如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| // USART_STM32F10x.c, line 1986
void USART_IRQHandler(const USART_RESOURCES *usart) {
uint32_t sr = usart->reg->SR; // 读取状态寄存器
// Reset local variables
val = 0U;
event = 0U;
data = 0U;
// 检查 RXNE(接收数据寄存器非空)
if (sr & USART_SR_RXNE & usart->reg->CR1) {
// 读取数据
data = (uint16_t)usart->reg->DR;
*(usart->xfer->rx_buf++) = (uint8_t)data;
usart->xfer->rx_cnt++;
// 检查是否接收完成
if (usart->xfer->rx_cnt == usart->xfer->rx_num) {
event |= ARM_USART_EVENT_RECEIVE_COMPLETE;
}
}
// 检查 IDLE(空闲线路检测)
if (sr & USART_SR_IDLE & usart->reg->CR1) {
usart->reg->DR; // 读取DR寄存器清除IDLE标志
event |= ARM_USART_EVENT_RX_TIMEOUT;
}
// 调用用户回调函数
if ((event && usart->info->cb_event) != 0U) {
usart->info->cb_event(event); // <-- 这里调用 USART1_Event_Callback
}
}
|
这里有一个蛮有意思的点,IDLEIE 、RXNEIE 在 USART_CR1 中的位置是与 IDLE、RXNE 在 USART_SR 中的位置是相同的!我想了好久为什么检测的时候要对 CR1 进行与计算,原因就是为了确保对应的中断触发时确认他们的触发器是启用的,避免处理那些不需要处理的中断。
借此,我们可以实现一个简单的 demo 展示如何使用这个 Driver:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
| #include "Driver_Common.h"
#include "Driver_USART.h"
#include "RTE_Components.h"
#include "stdint.h"
#include CMSIS_device_header
#include "string.h"
extern ARM_DRIVER_USART Driver_USART1;
static uint8_t rx_buffer[256];
static volatile bool rx_complete = false;
static volatile uint32_t rx_count = 0;
void USART1_Event_Callback(uint32_t event) {
if (event & ARM_USART_EVENT_RECEIVE_COMPLETE) {
// 接收到完整的256字节
rx_complete = true;
rx_count = 256;
// 停止接收
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0);
}
if (event & ARM_USART_EVENT_RX_TIMEOUT) {
// IDLE检测到,获取实际接收的字节数
rx_count = Driver_USART1.GetRxCount();
rx_complete = true;
// 停止接收
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0);
}
}
void USART1_Init() {
Driver_USART1.Initialize(USART1_Event_Callback);
Driver_USART1.PowerControl(ARM_POWER_FULL);
Driver_USART1.Control(ARM_USART_MODE_ASYNCHRONOUS |
ARM_USART_DATA_BITS_8 |
ARM_USART_PARITY_NONE |
ARM_USART_STOP_BITS_1 |
ARM_USART_FLOW_CONTROL_NONE, 115200);
Driver_USART1.Control(ARM_USART_CONTROL_TX, 1);
Driver_USART1.Control(ARM_USART_CONTROL_RX, 1);
}
int main() {
USART1_Init();
// 发送启动消息
const char* welcome = "USART CMSIS Demo Ready! Send data (max 256 bytes):\r\n";
Driver_USART1.Send(welcome, strlen(welcome));
while (Driver_USART1.GetStatus().tx_busy);
for (;;) {
// 清空缓冲区
memset(rx_buffer, 0, sizeof(rx_buffer));
// 启动接收256字节
rx_complete = false;
rx_count = 0;
int32_t result = Driver_USART1.Receive(rx_buffer, 256);
if (result == ARM_DRIVER_OK) {
// 简陋的计数
uint32_t timeout_counter = 0;
const uint32_t MAX_TIMEOUT = 100000;
// 等待接收完成
while (!rx_complete && timeout_counter < MAX_TIMEOUT) {
// 简单延时,让系统有时间处理中断
for (volatile int i = 0; i < 100; i++) __NOP();
timeout_counter++;
}
if (timeout_counter >= MAX_TIMEOUT) {
// 超时处理
const char* timeout_msg = "Timeout! No data received.\r\n";
Driver_USART1.Send(timeout_msg, strlen(timeout_msg));
while (Driver_USART1.GetStatus().tx_busy);
// 取消当前接收
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0);
} else {
// 正常接收到数据
if (rx_count > 0) {
// 发送确认消息
const char* ack = "Received: ";
Driver_USART1.Send(ack, strlen(ack));
while (Driver_USART1.GetStatus().tx_busy);
// 回显接收到的数据
Driver_USART1.Send(rx_buffer, rx_count);
while (Driver_USART1.GetStatus().tx_busy);
// 换行
const char* newline = "\r\n";
Driver_USART1.Send(newline, 2);
while (Driver_USART1.GetStatus().tx_busy);
} else {
const char* no_data = "No data received.\r\n";
Driver_USART1.Send(no_data, strlen(no_data));
while (Driver_USART1.GetStatus().tx_busy);
}
Driver_USART1.Control(ARM_USART_ABORT_RECEIVE, 0);
}
} else {
// 接收启动失败
const char* error_msg = "Failed to start receive!\r\n";
Driver_USART1.Send(error_msg, strlen(error_msg));
while (Driver_USART1.GetStatus().tx_busy);
}
// 短暂延时,然后继续下一轮接收
for (volatile uint32_t i = 0; i < 100000; i++) __NOP();
}
}
|
利用中断改良
经过上面对 CMSIS Driver 的研究,我们大致理解了这个中断怎么工作,以及 CMSIS 是如何处理对应的中断发生。接下来,我们就借用他们的思想,自己实现一个没有阻塞的改良版接收函数。
初始化
我们选择自己内建一个缓冲区,让数据在中断读取时都读到内建缓冲区内,在调用 usart1_receive_interrupt() 时才把数据从内建缓冲区移动到指定位置。
1
2
3
| volatile uint8_t usart1_rx_buffer[256];
volatile uint32_t usart1_rx_index = 0;
volatile uint8_t usart1_rx_complete = 0;
|
初始化部分与之前是基本一样的,不过我们要实现一个自己的中断处理,所以我们要自己启用对应中断。中断调用的函数名都在向量表中定义好了(在 CMSIS 中是 startup_stm32f10x_hd.s ),所以我们需要写好对应的函数,linker 会把检测到的函数放到对应的位置上。具体可以参照下面的内容。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| /*
* STM32 中断处理流程
*
* 1. 硬件事件发生(如USART接收到数据)
* ↓
* 2. 外设检查中断使能位(USART1->CR1 的 RXNEIE 位)
* ↓ (如果使能)
* 3. 外设向NVIC发送中断请求信号
* ↓
* 4. NVIC检查该中断是否被使能(NVIC_EnableIRQ)
* ↓ (如果使能)
* 5. NVIC检查中断优先级和屏蔽状态
* ↓ (如果允许)
* 6. CPU跳转到中断向量表中的对应地址
* ↓
* 7. 执行USART1_IRQHandler()函数
*/
uint8_t usart1_init_with_interrupt() {
...
// 配置NVIC - 启用USART1中断
NVIC_SetPriority(USART1_IRQn, 1); // 设置中断优先级
NVIC_EnableIRQ(USART1_IRQn); // 启用USART1中断
// 最后启用USART
USART1->CR1 |= USART_CR1_UE;
// 初始化中断相关变量
usart1_rx_index = 0;
usart1_rx_complete = 0;
return 0;
}
|
中断函数设计
通过对 CMSIS Driver 中中断函数的分析,我们可以写出这样子的中断函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
| // 硬件中断处理函数
void USART1_IRQHandler(void) {
uint32_t sr = USART1->SR;
// 检查接收数据寄存器非空中断
if (sr & USART_SR_RXNE) {
// 读取接收到的数据
uint8_t received_data = (uint8_t)(USART1->DR & 0xFF);
// 将数据存储到缓冲区(防止溢出)
if (usart1_rx_index < sizeof(usart1_rx_buffer)) {
usart1_rx_buffer[usart1_rx_index++] = received_data;
}
// 如果读入的数据数量大于缓冲区,也设置接收完成
// 其实这里最好是塞一个解决溢出的方案(类似动态扩容),不过目前我还不是很熟悉内存管理机制,就先不做了
if (usart1_rx_index >= sizeof(usart1_rx_buffer)) {
usart1_rx_complete = 1;
}
}
// 检查空闲线路中断(接收完成)
if (sr & USART_SR_IDLE) {
// 读取DR寄存器清除IDLE标志
USART1->DR;
// 设置接收完成标志
usart1_rx_complete = 1;
}
// 检查溢出错误
if (sr & USART_SR_ORE) {
USART1->DR;
}
// 检查帧错误
if (sr & USART_SR_FE) {
USART1->DR;
}
// 检查校验错误
if (sr & USART_SR_PE) {
USART1->DR;
}
}
|
接收函数
我们建立了一个 usart1_rx_complete 的 flag,当数据接收完成时就会被设置为 true。所以我们可以这样实现接收函数:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| uint8_t usart1_receive_interrupt(void* buf, uint32_t* len) {
uint8_t* data = (uint8_t*)buf;
if (usart1_rx_complete) {
// 复制接收到的数据
for (uint32_t i = 0; i < usart1_rx_index && i < *len; i++) {
data[i] = usart1_rx_buffer[i];
}
*len = usart1_rx_index; // 返回实际接收的字节数
// 重置状态
usart1_rx_index = 0;
usart1_rx_complete = 0;
return 0; // 成功
}
*len = 0;
return 1; // 没有数据
}
|
Guard
因为我们自己实现的 USART1_IRQHandler 会和 CMSIS Driver 的实现冲突,所以我们最好只在不使用 CMSIS USART Driver 时使用我们自己的实现。所以我们要给我们添加中断的地方使用 #ifdef 套起来,只在需要的时候启用。
1
2
3
4
5
| #ifdef SIMPLE_USART_USES_INTERRUPT
...
#endif
// 如要使用:
#define SIMPLE_USART_USES_INTERRUPT
|
演示程序
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
| #include "RTE_Components.h"
#include <stdint.h>
#include <string.h>
#include CMSIS_device_header
#include "libs/usart/simple_usart1.h"
int main() {
// 使用带中断的USART初始化
usart1_init_with_interrupt();
// 发送欢迎消息
const char* welcome = "USART1 Interrupt Demo Ready! Send data:\r\n";
usart1_send((void*)welcome, strlen(welcome));
uint8_t rx_buffer[256];
uint32_t rx_len;
for (;;) {
// 检查是否有新数据通过中断接收
rx_len = sizeof(rx_buffer);
if (usart1_receive_interrupt(rx_buffer, &rx_len) == 0) {
// 有新数据接收到
// 发送确认消息
const char* ack = "Received (interrupt): ";
usart1_send(ack, strlen(ack));
// 回显接收到的数据
usart1_send(rx_buffer, rx_len);
// 添加换行
const char* newline = "\r\n";
usart1_send(newline, 2);
}
for (volatile uint32_t i = 0; i < 10000; i++) {
__NOP(); // 简单延时
}
}
}
|
总结
其实即使是改良之后的读取,依然不是很好,所以还是更推荐直接使用 CMSIS Driver 的实现 XD。自己尝试去写,只是为了更加了解这些东西具体是怎么实现的,所以应该也没有必要去细究写的代码怎么样。
另外考虑到这只是我自己在学习过程中的见解,所以可能文中有很多错误的地方,还请大佬们多多指正 OmO
代码应该过几天我就会开放在我个人的 GitHub 的仓库里,所以最后的完整代码就不写在文里了。