SPI 通信
简介
STM32 SPI 通信的具体内容可以参考这个视频,这里只是记录一下重点内容。
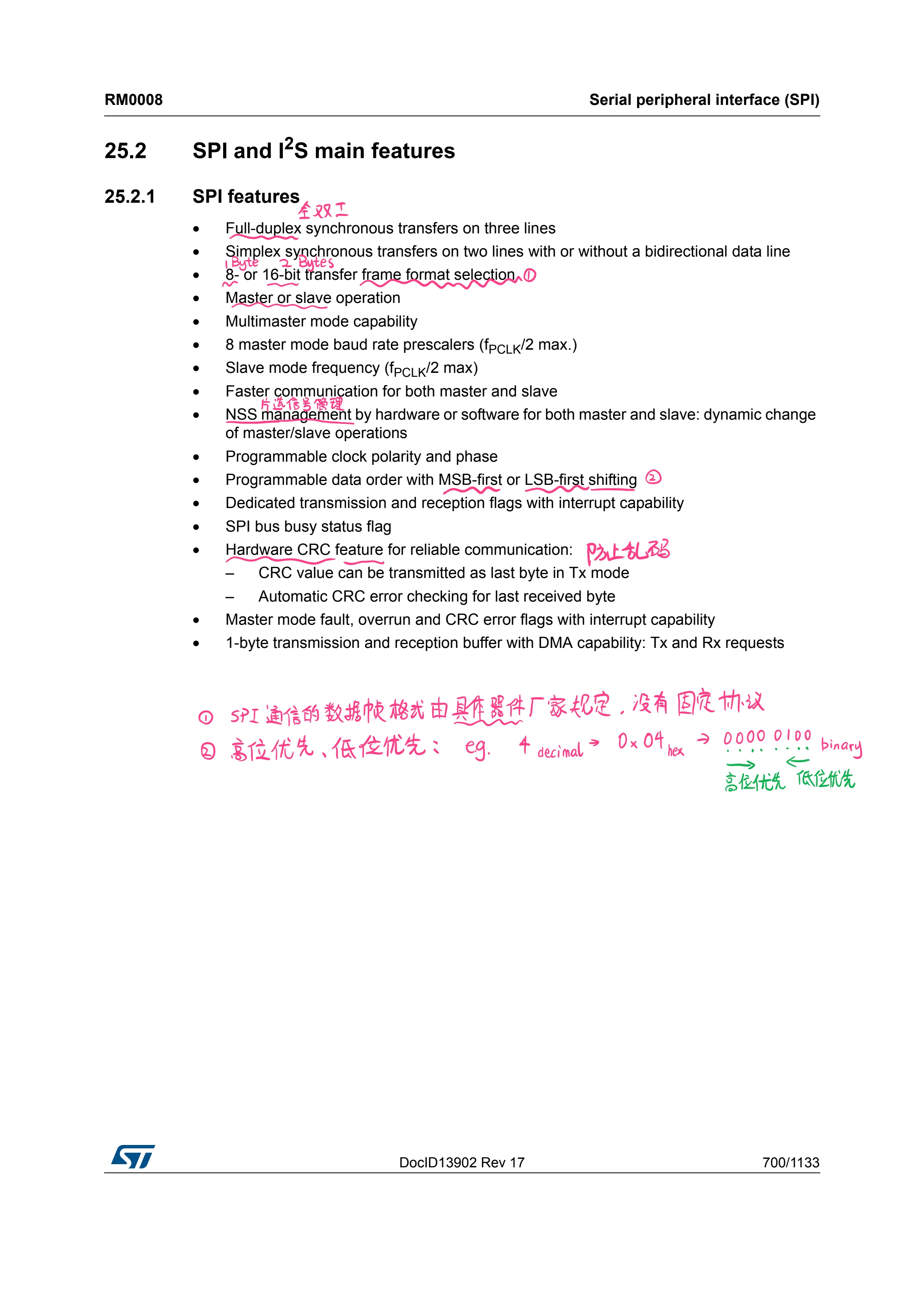
上图为 STM32 支持的 SPI 特性。
通常SPI通过4个引脚与外部器件相连:
- MISO:主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
- MOSI:主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。
- SCK:串口时钟,作为主设备的输出,从设备的输入。
- NSS:从设备选择。这是一个可选的引脚,用来选择主/从设备。它的功能是用来作为“片 选引脚”,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。
基本原理
全双工/半双工
双工是指在一条数据线上可以进行双向通信。全双工允许两台设备同时进行通信,半双工则需要在一个设备通信完成后进行通信,不能同时进行通信。STM32的SPI可以工作在全双工模式下。
时钟信号的相位和极性
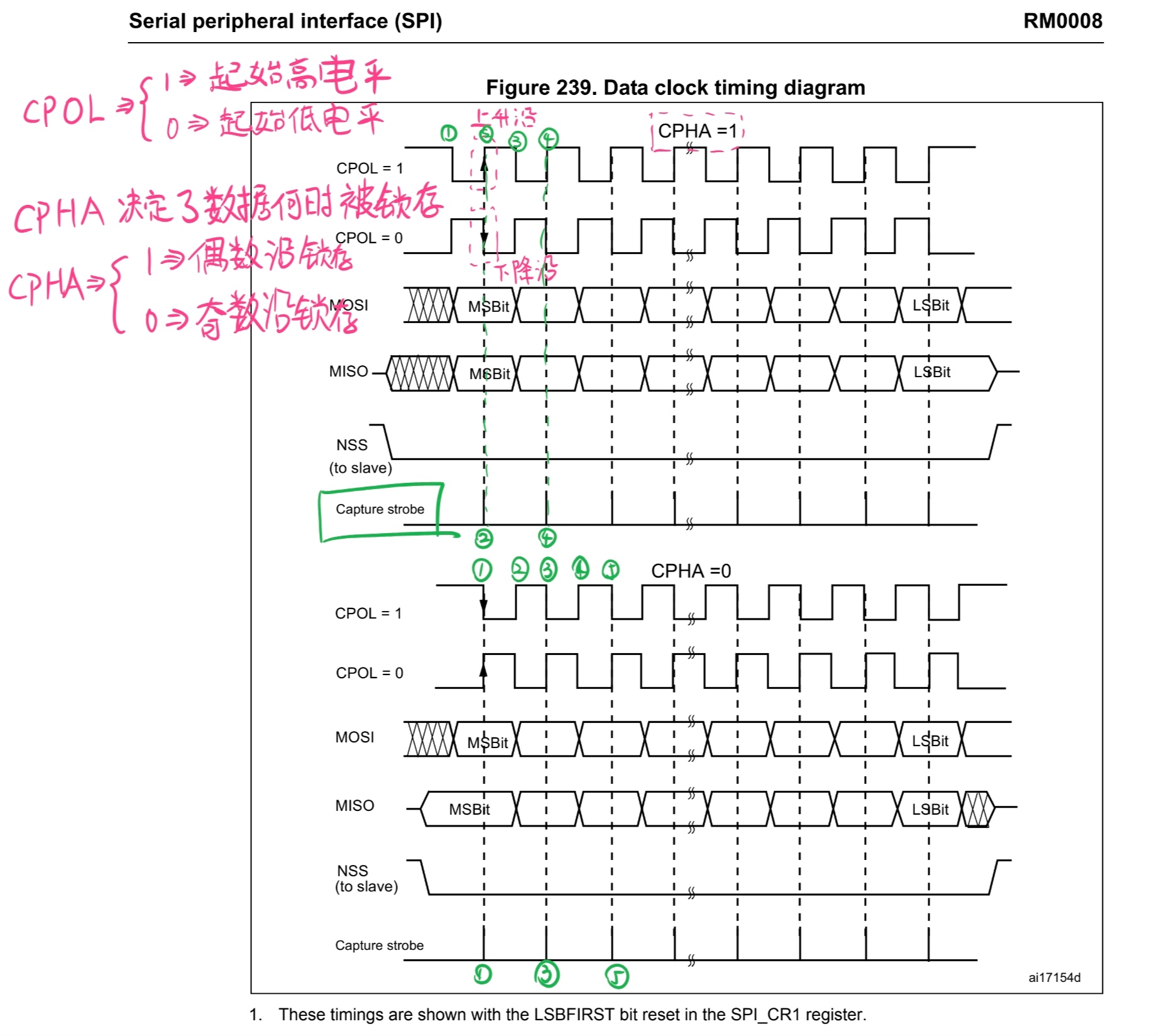
上图介绍了时钟信号的相位和极性。具体有如下特点:
- CPOL 决定了空闲时的电平: 0-> 起始(空闲)时为低电平,1-> 起始(空闲)时为高电平。
- CPHA 决定了时钟相位,用于采样数据: 0->偶数沿采样,1->奇数沿采样。
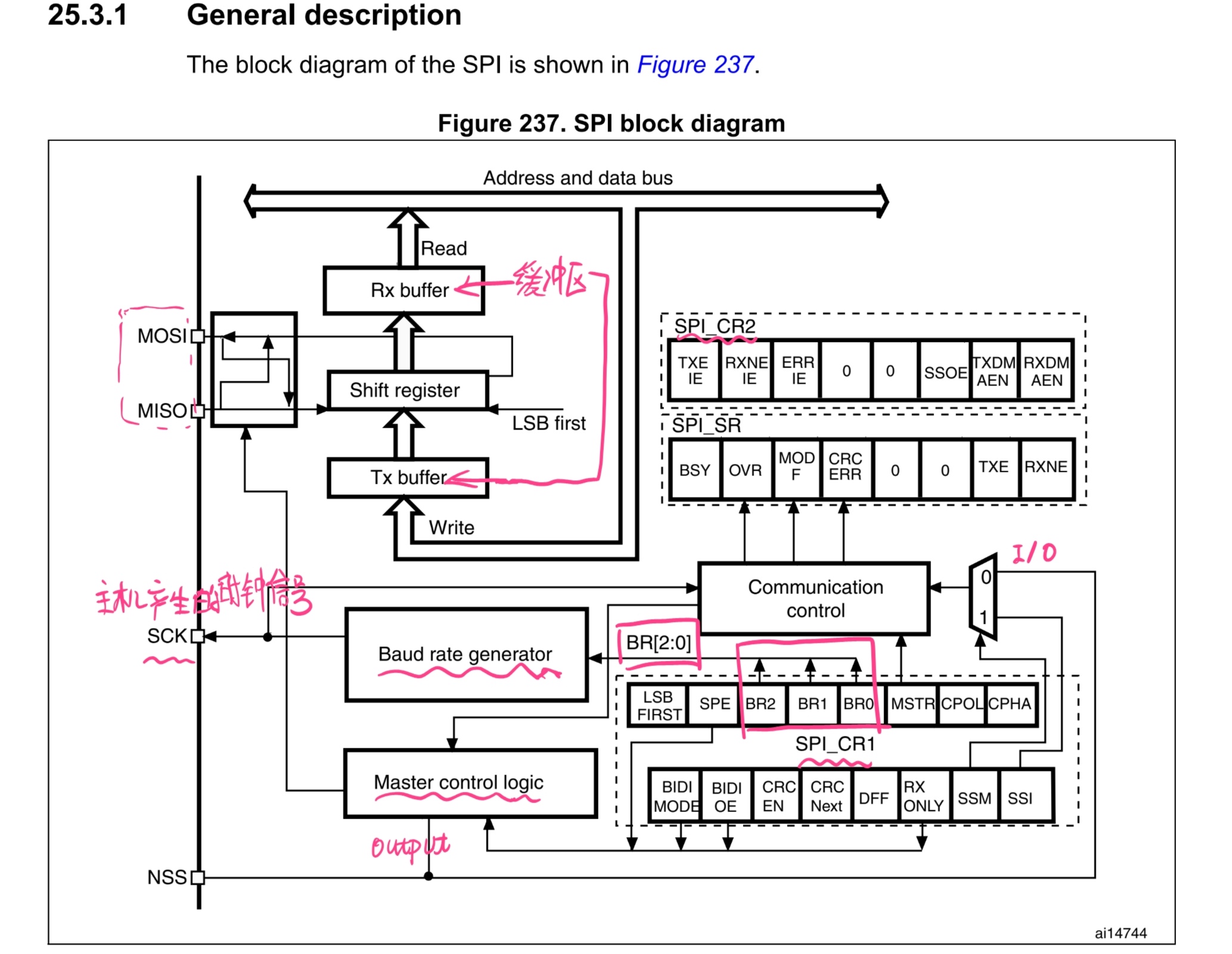
缓冲区
正如 C 的 printf 输出拥有缓冲区,SPI 通信也具有 RX buffer 和 TX buffer。发送数据和接收数据时,把数据写入缓冲区,从缓冲区中一个一个字节的发送,接受数据时,同样从缓冲区读入。
中断
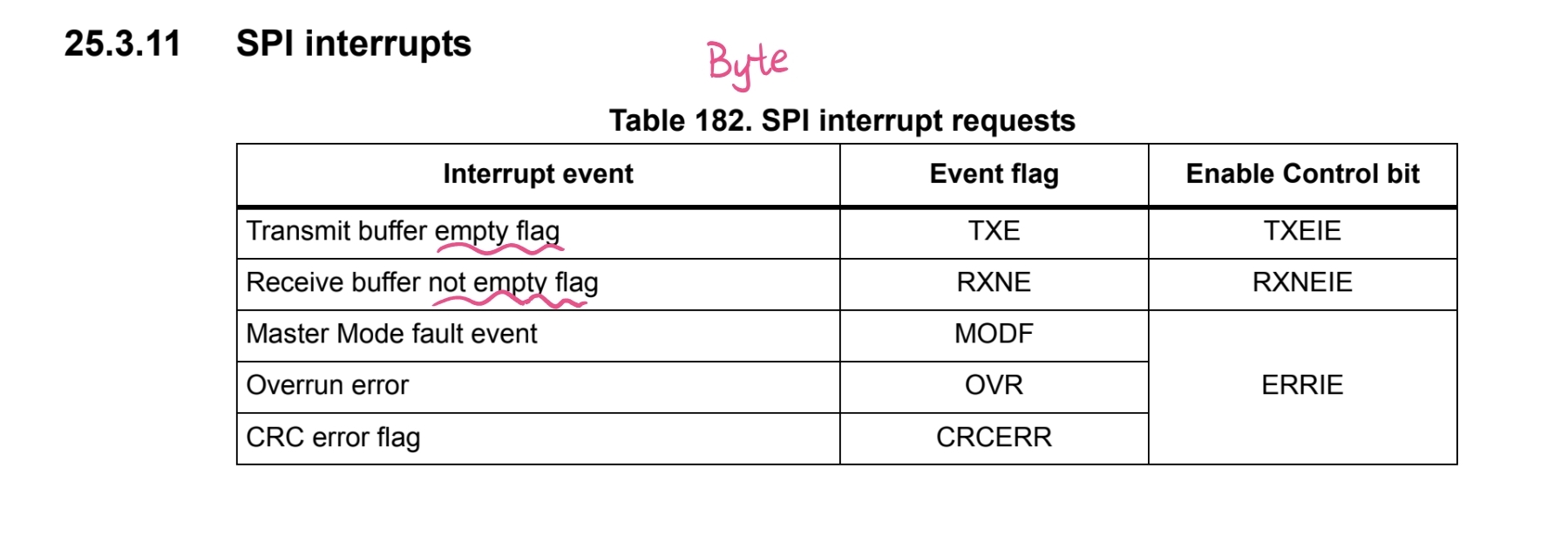
上表介绍了 SPI 中断的内容。
NSS 引脚
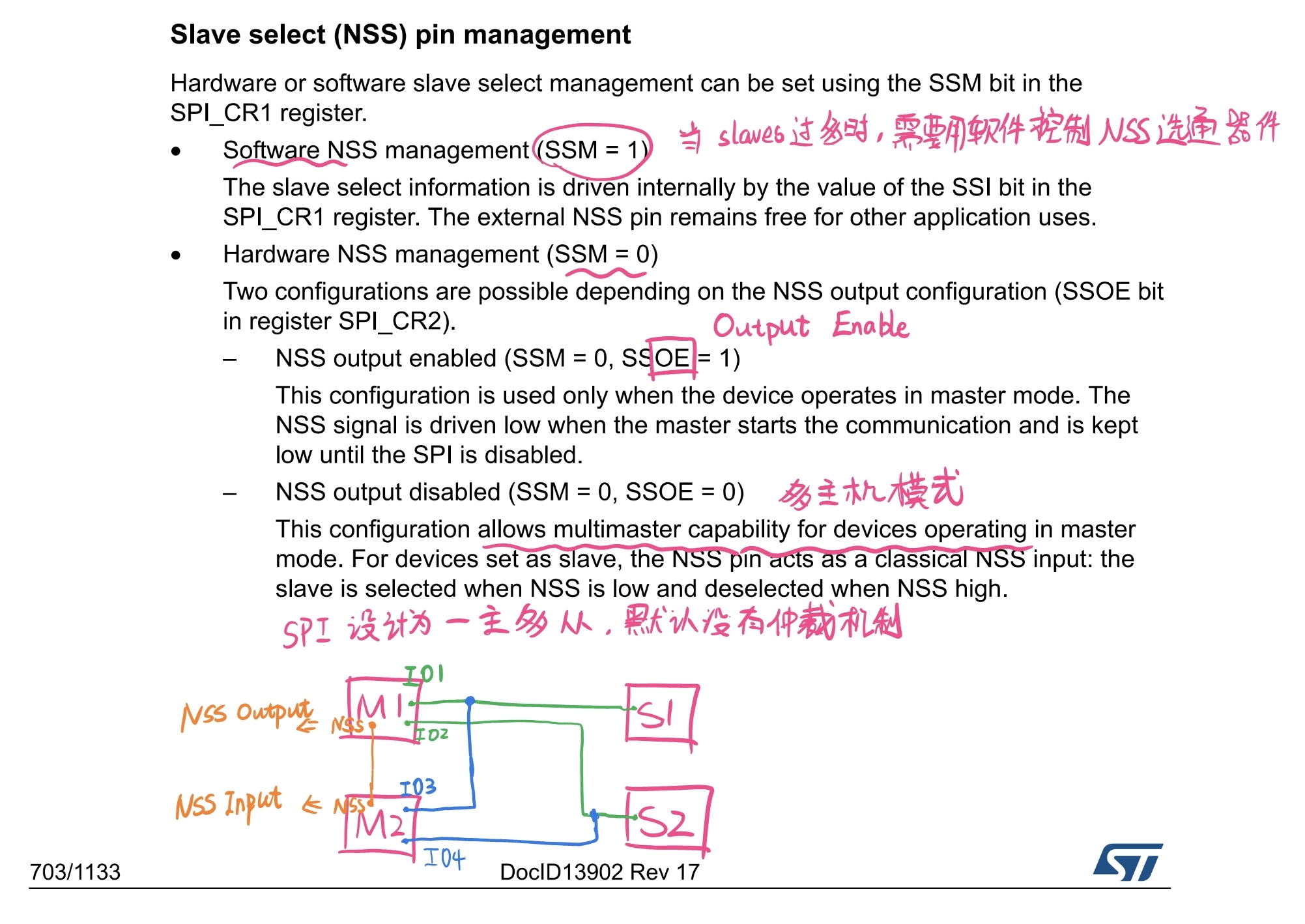
NSS 引脚可以配置为软件管理与硬件管理模式。
当从机比较多时,应使用软件管理。从机较少时,可以使用硬件管理,并开启 SSOE。当使用硬件管理且SSOE为0时,可以配置多主机模式。不过SPI一般应用为一主多从,所以没有主机冲突解决机制,这时有一个例子就是上图中 M1 和 M2 两个主机控制两个从机,输出并联到一起,并将两个设备的 NSS 连接,如果 M1 在进行通讯,则 M1 向 M2 的 NSS 引脚输出低电平,此时 M2 切断连接,一直等待 M1 给 M2 的 NSS 引脚再次传入高电平时进行通讯。这只是一种可能的解决方案,实际运用时比较复杂。
片选
对于片选来说,最重要的就是保证不用到对应外设时一定要保持高电平,只在需要的时候拉低电平,用完马上上拉。
当我们以软件管理的方式进行片选管理时,就需要注意片选信号的意义。
SPI 具有以下两个特点:
- 共享总线: 一个SPI主设备可以连接多个从设备
- 同时只能与一个设备通信: 通过片选信号选择具体的设备
为了实现同时只能与一个设备通信的要求,我们就需要使用片选(Chip Select)信号来管理从机。比如对下面的 ST7789 的控制:
| CS状态 | 电平 | ST7789状态 | 意义 |
|---|
| 拉高 (1) | 高电平 | 未选中 | ST7789忽略SPI总线上的所有信号 |
| 拉低 (0) | 低电平 | 被选中 | ST7789监听并响应SPI总线信号 |
对于单设备时,也需要通过片选来让 ST7789 知道何时要监听数据,何时停止监听数据,数据包的边界在哪里。
假设有多个设备,那么片选就更加重要:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
| // 假设你有多个SPI设备:
#define ST7789_CS_PIN 1 // PE1 - LCD显示屏
#define SD_CARD_CS_PIN 2 // PE2 - SD卡
#define SENSOR_CS_PIN 3 // PE3 - 传感器
// 与LCD通信时:
GPIO_RESET(cs_port, ST7789_CS_PIN); // LCD被选中
GPIO_SET(cs_port, SD_CARD_CS_PIN); // SD卡被忽略
GPIO_SET(cs_port, SENSOR_CS_PIN); // 传感器被忽略
// 与SD卡通信时:
GPIO_SET(cs_port, ST7789_CS_PIN); // LCD被忽略
GPIO_RESET(cs_port, SD_CARD_CS_PIN); // SD卡被选中
GPIO_SET(cs_port, SENSOR_CS_PIN); // 传感器被忽略
|
ST7789
简介
手上的 MCUTools 的开发板集成了一块 2.8 寸的 LCD 显示模块,该模块使用 ST7789 作为显示驱动芯片,支持 320x240 分辨率,使用 SPI 作为通信方式。
ST7789 的参考手册可以在这里找到:ST7789VW_SPEC_V1.0
LibDriver’s ST7789 driver 这里是一个实现非常完整的 ST7789 驱动程序,很好的将 Hardware Interface 与 Driver 本身分离开了,使得这个驱动可以只修改 interface 层就可以实现移植。不过这个驱动本身比较繁杂,所以我们就借用一下他 Interface 分离的思想自己写一个简单的驱动出来。
开发板上对应的引脚如下:
| 功能 | 引脚 | 说明 |
|---|
| Backlight | PA8 | 背光开关控制 |
| DCX (数据/命令) | PE0 | 高电平=数据,低电平=命令 |
| CS (片选) | PE1 | SPI片选信号 |
| RST (复位) | PE3 | 硬件复位信号 |
| SPI1_SCK | PA5 | SPI时钟 |
| SPI1_MOSI | PA7 | SPI MOSI |
| SPI1_MISO | PA6 | SPI MISO |
顺便介绍一下
Interface 层剖析
以下是 LibDriver 的 driver_st7789_interface.h 里的函数原型:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| // SPI 操作部分
uint8_t st7789_interface_spi_init(void);
uint8_t st7789_interface_spi_deinit(void);
uint8_t st7789_interface_spi_write_cmd(uint8_t *buf, uint16_t len);
// 系统接口部分
void st7789_interface_delay_ms(uint32_t ms);
void st7789_interface_debug_print(const char *const fmt, ...);
// Command/Data 接口部分
uint8_t st7789_interface_cmd_data_gpio_init(void);
uint8_t st7789_interface_cmd_data_gpio_deinit(void);
uint8_t st7789_interface_cmd_data_gpio_write(uint8_t value);
// 复位部分
uint8_t st7789_interface_reset_gpio_init(void);
uint8_t st7789_interface_reset_gpio_deinit(void);
uint8_t st7789_interface_reset_gpio_write(uint8_t value);
|
不过我们的 ST7789 模块还有一个用于开启 LCD 背光的引脚,所以也在这里补充上:
1
2
3
| uint8_t st7789_interface_backlight_gpio_init(void);
uint8_t st7789_interface_backlight_gpio_deinit(void);
uint8_t st7789_interface_backlight_gpio_write(uint8_t value);
|
其中每个接口部分都有三种操作:初始化,去初始化,写入数据
SPI 部分
我们在这里使用 CMSIS 提供的 SPI API 来实现 SPI 的交互。在 csolution 中包含下面四个组件即可使用:
1
2
3
4
| - component: ARM::CMSIS Driver:SPI:Custom
- component: Keil::CMSIS Driver:SPI
- component: Keil::Device:DMA
- component: Keil::Device:GPIO
|
首先,我们来关注一下 Driver_SPI.h 里对 SPI Driver 的定义:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| typedef struct _ARM_DRIVER_SPI {
ARM_DRIVER_VERSION (*GetVersion) (void); ///< Pointer to \ref ARM_SPI_GetVersion : Get driver version.
ARM_SPI_CAPABILITIES (*GetCapabilities) (void); ///< Pointer to \ref ARM_SPI_GetCapabilities : Get driver capabilities.
int32_t (*Initialize) (ARM_SPI_SignalEvent_t cb_event); ///< Pointer to \ref ARM_SPI_Initialize : Initialize SPI Interface.
int32_t (*Uninitialize) (void); ///< Pointer to \ref ARM_SPI_Uninitialize : De-initialize SPI Interface.
int32_t (*PowerControl) (ARM_POWER_STATE state); ///< Pointer to \ref ARM_SPI_PowerControl : Control SPI Interface Power.
int32_t (*Send) (const void *data, uint32_t num); ///< Pointer to \ref ARM_SPI_Send : Start sending data to SPI Interface.
int32_t (*Receive) ( void *data, uint32_t num); ///< Pointer to \ref ARM_SPI_Receive : Start receiving data from SPI Interface.
int32_t (*Transfer) (const void *data_out,
void *data_in,
uint32_t num); ///< Pointer to \ref ARM_SPI_Transfer : Start sending/receiving data to/from SPI.
uint32_t (*GetDataCount) (void); ///< Pointer to \ref ARM_SPI_GetDataCount : Get transferred data count.
int32_t (*Control) (uint32_t control, uint32_t arg); ///< Pointer to \ref ARM_SPI_Control : Control SPI Interface.
ARM_SPI_STATUS (*GetStatus) (void); ///< Pointer to \ref ARM_SPI_GetStatus : Get SPI status.
} const ARM_DRIVER_SPI;
|
而 SPI_STM32F10x.c 中这样的定义:
1
2
3
4
5
6
7
8
9
10
11
12
13
| ARM_DRIVER_SPI Driver_SPI1 = {
SPIX_GetVersion,
SPIX_GetCapabilities,
SPI1_Initialize,
SPI1_Uninitialize,
SPI1_PowerControl,
SPI1_Send,
SPI1_Receive,
SPI1_Transfer,
SPI1_GetDataCount,
SPI1_Control,
SPI1_GetStatus
};
|
其中,大部分函数的名字和他的作用是一样的。其中 CMSIS Driver 提供的 Initialize 貌似会自动使能对应的 RCC (?),我在测试的时候把用来开启 RCC->APB2ENR |= RCC_APB2ENR_SPI1EN; 注释掉以后仍能正常通信,所以有这种推测 OxO。
由此,我们可以实现 Interface 中 SPI 部分了:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
| // ST7789 GPIO引脚定义
#define ST7789_CS_PORT 'E' // 片选引脚 PE1
#define ST7789_CS_PIN 1
#define ST7789_DC_PORT 'E' // 数据/命令引脚 PE0
#define ST7789_DC_PIN 0
#define ST7789_RST_PORT 'E' // 复位引脚 PE3
#define ST7789_RST_PIN 3
#define ST7789_BL_PORT 'A' // 背光引脚 PA8
#define ST7789_BL_PIN 8
// GPIO操作宏定义
#define GPIO_PORT(bank) ((GPIO_TypeDef *)(GPIOA_BASE + 0x400 * ((bank) - 'A')))
#define GPIO_SET(port, pin) (port->BSRR = (1 << pin))
#define GPIO_RESET(port, pin) (port->BSRR = (1 << (pin + 16)))
// 直接获取 Driver_SPI1
extern ARM_DRIVER_SPI Driver_SPI1;
// SPI 事件回调函数,在 Initialize 的时候传入
void SPI1_Event_Callback(uint32_t event) {
// 事实上我们现在并没有真的用到这个回调函数,所以这里留空也可以,这里只是展示一下都能写点啥
if (event & ARM_SPI_EVENT_TRANSFER_COMPLETE) {
// SPI传输完成
}
if (event & ARM_SPI_EVENT_DATA_LOST) {
// 数据丢失错误
}
if (event & ARM_SPI_EVENT_MODE_FAULT) {
// 模式错误
}
}
/**
* @brief interface spi bus init
* @return status code
* - 0 success
* - 1 spi init failed
* @note none
*/
uint8_t st7789_interface_spi_init(void)
{
int32_t status;
// 初始化片选引脚
gpio_init_output(ST7789_CS_PORT, ST7789_CS_PIN);
GPIO_TypeDef *cs_port = GPIO_PORT(ST7789_CS_PORT);
GPIO_SET(cs_port, ST7789_CS_PIN); // 默认拉高片选
// 初始化 Driver_SPI1
status = Driver_SPI1.Initialize(SPI1_Event_Callback);
if (status != ARM_DRIVER_OK) {
return 1;
}
// 给 Driver_SPI1 使能
status = Driver_SPI1.PowerControl(ARM_POWER_FULL);
if (status != ARM_DRIVER_OK) {
return 1;
}
// 设置 SPI 工作模式
/* 第二个参数指定了 SPI1 时钟,SPI1时钟 = APB2时钟 / 分频系数 (SPI1 挂载在 APB2 上)
* 分频系数一般有 2, 4, 8, 16, 32, 64, 128, 256 等
* 我设置为 18MHz 了,你也可以设置成别的,这会影响通信速率与稳定性
*/
status = Driver_SPI1.Control(ARM_SPI_MODE_MASTER | // 主模式
ARM_SPI_CPOL0_CPHA0 | // 时钟极性和相位
ARM_SPI_SS_MASTER_SW | // 软件控制片选
ARM_SPI_DATA_BITS(8), // 8位数据
18000000);
if (status != ARM_DRIVER_OK) {
return 1;
}
return 0;
}
/**
* @brief interface spi bus deinit
* @return status code
* - 0 success
* - 1 spi deinit failed
* @note none
*/
uint8_t st7789_interface_spi_deinit(void)
{
int32_t status;
// 先关闭SPI电源
status = Driver_SPI1.PowerControl(ARM_POWER_OFF);
if (status != ARM_DRIVER_OK) {
return 1;
}
// 然后去初始化SPI驱动
status = Driver_SPI1.Uninitialize();
if (status != ARM_DRIVER_OK) {
return 1;
}
// 将片选引脚设置为输入模式
GPIO_TypeDef *gpio = GPIO_PORT(ST7789_CS_PORT);
if (ST7789_CS_PIN < 8) {
uint32_t pos = ST7789_CS_PIN * 4;
gpio->CRL &= ~(0xF << pos); // 清除配置位,默认为浮空输入
} else if (ST7789_CS_PIN < 16) {
uint32_t pos = (ST7789_CS_PIN - 8) * 4;
gpio->CRH &= ~(0xF << pos); // 清除配置位,默认为浮空输入
}
return 0;
}
/**
* @brief interface spi bus write
* @param[in] *buf pointer to a data buffer
* @param[in] len length of data buffer
* @return status code
* - 0 success
* - 1 write failed
* @note none
*/
uint8_t st7789_interface_spi_write_cmd(uint8_t *buf, uint16_t len)
{
int32_t status;
GPIO_TypeDef *cs_port = GPIO_PORT(ST7789_CS_PORT);
// 拉低片选
GPIO_RESET(cs_port, ST7789_CS_PIN);
// 发送数据
status = Driver_SPI1.Send(buf, len);
if (status != ARM_DRIVER_OK) {
GPIO_SET(cs_port, ST7789_CS_PIN); // 失败时释放片选
return 1;
}
// 等待传输完成
while (Driver_SPI1.GetStatus().busy);
// 拉高片选
GPIO_SET(cs_port, ST7789_CS_PIN);
return 0;
}
|
这里面我们还是来关注一下片选:
- 在初始化 SPI 接口时,我们先初始化并拉高了 CS 引脚的电平,确保 ST7789 不处理 SPI 总线上的任何内容,然后再初始化 SPI1。
- 在给 ST7789 传输数据时,我们要先拉低片选,这样 ST7789 才会开始监听并接受数据,然后等待传输完成,最后再次拉高片选。
对于片选来说,最重要的就是保证不用到对应外设时一定要保持高电平,只在需要的时候拉低电平,用完马上上拉。
GPIO 部分
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
| // 初始化GPIO引脚为推挽输出模式
static void gpio_init_output(char bank, uint8_t pin) {
GPIO_TypeDef *gpio = GPIO_PORT(bank);
if (pin < 8) {
uint32_t pos = pin * 4;
gpio->CRL &= ~(0xF << pos); // 清除配置位
gpio->CRL |= (0x2 << pos); // 设置为2MHz输出,推挽模式
} else if (pin < 16) {
uint32_t pos = (pin - 8) * 4;
gpio->CRH &= ~(0xF << pos); // 清除配置位
gpio->CRH |= (0x2 << pos); // 设置为2MHz输出,推挽模式
}
}
/**
* @brief interface command && data gpio init
* @return status code
* - 0 success
* - 1 gpio init failed
* @note none
*/
uint8_t st7789_interface_cmd_data_gpio_init(void)
{
// 初始化DC引脚为输出模式
gpio_init_output(ST7789_DC_PORT, ST7789_DC_PIN);
// 设置默认状态为命令模式 (DC = 0)
GPIO_TypeDef *dc_port = GPIO_PORT(ST7789_DC_PORT);
GPIO_RESET(dc_port, ST7789_DC_PIN);
return 0;
}
/**
* @brief interface command && data gpio deinit
* @return status code
* - 0 success
* - 1 gpio deinit failed
* @note none
*/
uint8_t st7789_interface_cmd_data_gpio_deinit(void)
{
// 将DC引脚设置为输入模式(浮空输入)
GPIO_TypeDef *gpio = GPIO_PORT(ST7789_DC_PORT);
if (ST7789_DC_PIN < 8) {
uint32_t pos = ST7789_DC_PIN * 4;
gpio->CRL &= ~(0xF << pos); // 清除配置位,默认为浮空输入
} else if (ST7789_DC_PIN < 16) {
uint32_t pos = (ST7789_DC_PIN - 8) * 4;
gpio->CRH &= ~(0xF << pos); // 清除配置位,默认为浮空输入
}
return 0;
}
/**
* @brief interface command && data gpio write
* @param[in] value written value
* @return status code
* - 0 success
* - 1 gpio write failed
* @note none
*/
uint8_t st7789_interface_cmd_data_gpio_write(uint8_t value)
{
GPIO_TypeDef *dc_port = GPIO_PORT(ST7789_DC_PORT);
if (value) {
// 数据模式 (DC = 1)
GPIO_SET(dc_port, ST7789_DC_PIN);
} else {
// 命令模式 (DC = 0)
GPIO_RESET(dc_port, ST7789_DC_PIN);
}
return 0;
}
/**
* @brief interface reset gpio init
* @return status code
* - 0 success
* - 1 gpio init failed
* @note none
*/
uint8_t st7789_interface_reset_gpio_init(void)
{
// 初始化RST引脚为输出模式
gpio_init_output(ST7789_RST_PORT, ST7789_RST_PIN);
// 设置默认状态为高电平(非复位状态)
GPIO_TypeDef *rst_port = GPIO_PORT(ST7789_RST_PORT);
GPIO_SET(rst_port, ST7789_RST_PIN);
return 0;
}
/**
* @brief interface reset gpio deinit
* @return status code
* - 0 success
* - 1 gpio deinit failed
* @note none
*/
uint8_t st7789_interface_reset_gpio_deinit(void)
{
// 将RST引脚设置为输入模式(浮空输入)
GPIO_TypeDef *gpio = GPIO_PORT(ST7789_RST_PORT);
if (ST7789_RST_PIN < 8) {
uint32_t pos = ST7789_RST_PIN * 4;
gpio->CRL &= ~(0xF << pos); // 清除配置位,默认为浮空输入
} else if (ST7789_RST_PIN < 16) {
uint32_t pos = (ST7789_RST_PIN - 8) * 4;
gpio->CRH &= ~(0xF << pos); // 清除配置位,默认为浮空输入
}
return 0;
}
/**
* @brief interface reset gpio write
* @param[in] value written value
* @return status code
* - 0 success
* - 1 gpio write failed
* @note none
*/
uint8_t st7789_interface_reset_gpio_write(uint8_t value)
{
GPIO_TypeDef *rst_port = GPIO_PORT(ST7789_RST_PORT);
if (value) {
// 非复位状态 (RST = 1)
GPIO_SET(rst_port, ST7789_RST_PIN);
} else {
// 复位状态 (RST = 0)
GPIO_RESET(rst_port, ST7789_RST_PIN);
}
return 0;
}
/**
* @brief interface backlight gpio init
* @return status code
* - 0 success
* - 1 gpio init failed
* @note none
*/
uint8_t st7789_interface_backlight_gpio_init(void)
{
// 初始化背光控制引脚为推挽输出模式
gpio_init_output(ST7789_BL_PORT, ST7789_BL_PIN);
return 0;
}
/**
* @brief interface backlight gpio deinit
* @return status code
* - 0 success
* - 1 gpio deinit failed
* @note none
*/
uint8_t st7789_interface_backlight_gpio_deinit(void)
{
// 关闭背光
st7789_interface_backlight_gpio_write(0);
return 0;
}
/**
* @brief interface backlight gpio write
* @param[in] value written value (1=on, 0=off)
* @return status code
* - 0 success
* - 1 gpio write failed
* @note none
*/
uint8_t st7789_interface_backlight_gpio_write(uint8_t value)
{
GPIO_TypeDef *bl_port = GPIO_PORT(ST7789_BL_PORT);
if (value) {
// 开启背光 (BL = 1)
GPIO_SET(bl_port, ST7789_BL_PIN);
} else {
// 关闭背光 (BL = 0)
GPIO_RESET(bl_port, ST7789_BL_PIN);
}
return 0;
}
|
这一部分值得关注的是 DC gpio。DC,即 Data / Command,是 ST7789 用来确定 SPI 总线上传入的是数据还是指令。这一点会在下面写驱动时提及。总之,DC=1时为数据模式,DC=0时为指令模式。
其他部分
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| /**
* @brief interface delay ms
* @param[in] ms time
* @note none
*/
void st7789_interface_delay_ms(uint32_t ms)
{
// 使用简单的循环延时
// 假设系统时钟为72MHz,大概的循环次数
volatile uint32_t count = ms * 18000; // 大约1ms的延时
while (count--) {
__NOP(); // ARM的空操作指令
}
}
/**
* @brief interface print format data
* @param[in] fmt format data
* @note none
*/
void st7789_interface_debug_print(const char *const fmt, ...)
{
(void)fmt; // 避免未使用参数的警告
// 之后实现 stdio 重定向至 UART 后会在这里实现输出 debug 信息的功能
}
|
实现驱动
大概的工作原理
我们先来介绍一下工作原理。ST7789 内置了一个图像缓冲区(你也可以理解为显存),屏幕则通过这个缓冲区的内容进行显示,这一点比较类似 MCU 的寄存器。每一个像素点对应了一个颜色信息,在缓冲区内存储,通过修改这个缓冲区,我们就可以实现更改屏幕上显示的图像。另外,颜色信息的储存也有不同的方法。
但是戏说不是胡说,改编不是乱编,对于 ST7789 来说,从 SPI 总线上传过来内容有很多种,我怎么知道如何修改对应的内容呢?这里,我们就引入了 Data/Command 的概念,将指令和数据分开来,通过先传入指令告诉芯片如何处理马上要传过来的数据。这是如何实现的呢?它使用了一个 DC 引脚,使得 DC=1 时指示传过来的是指令,DC = 0 时指示传过来的是数据。
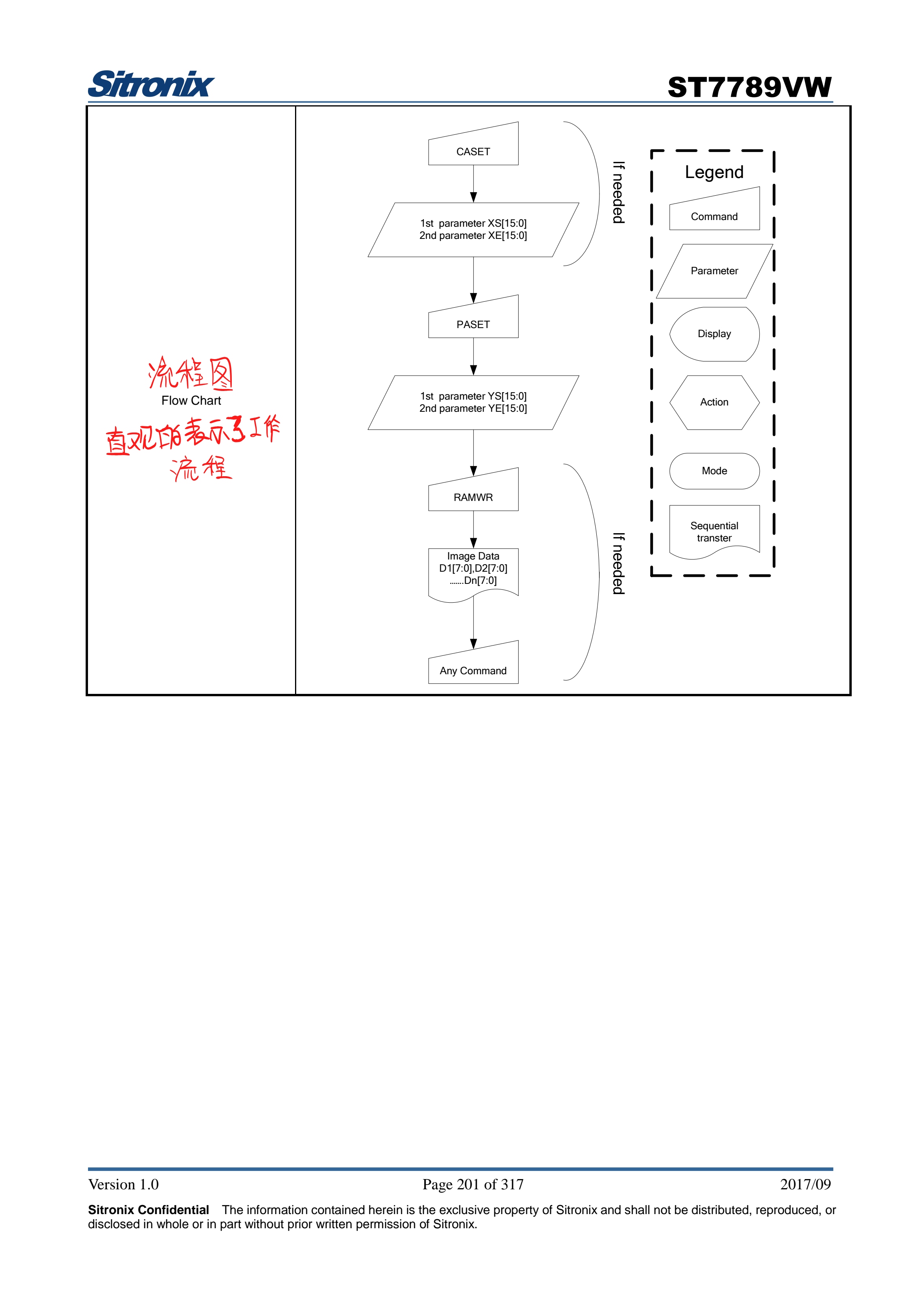
我们要绘制一个矩形,首先要设置一个显示窗口 ( CASET, RASET ),然后通过写入内存 ( RAMWR ) 向显示窗口填充像素。
我们这个简易的驱动程序中直接使用了默认配置,实际上有很多东西都是可以配置的,比如内存访问控制位所定义的内容等等,这些如果后期感兴趣可以去慢慢翻阅ST7789的参考手册去探索,这里就直接使用默认配置初始化了显示屏,主打一个能亮就行(逃
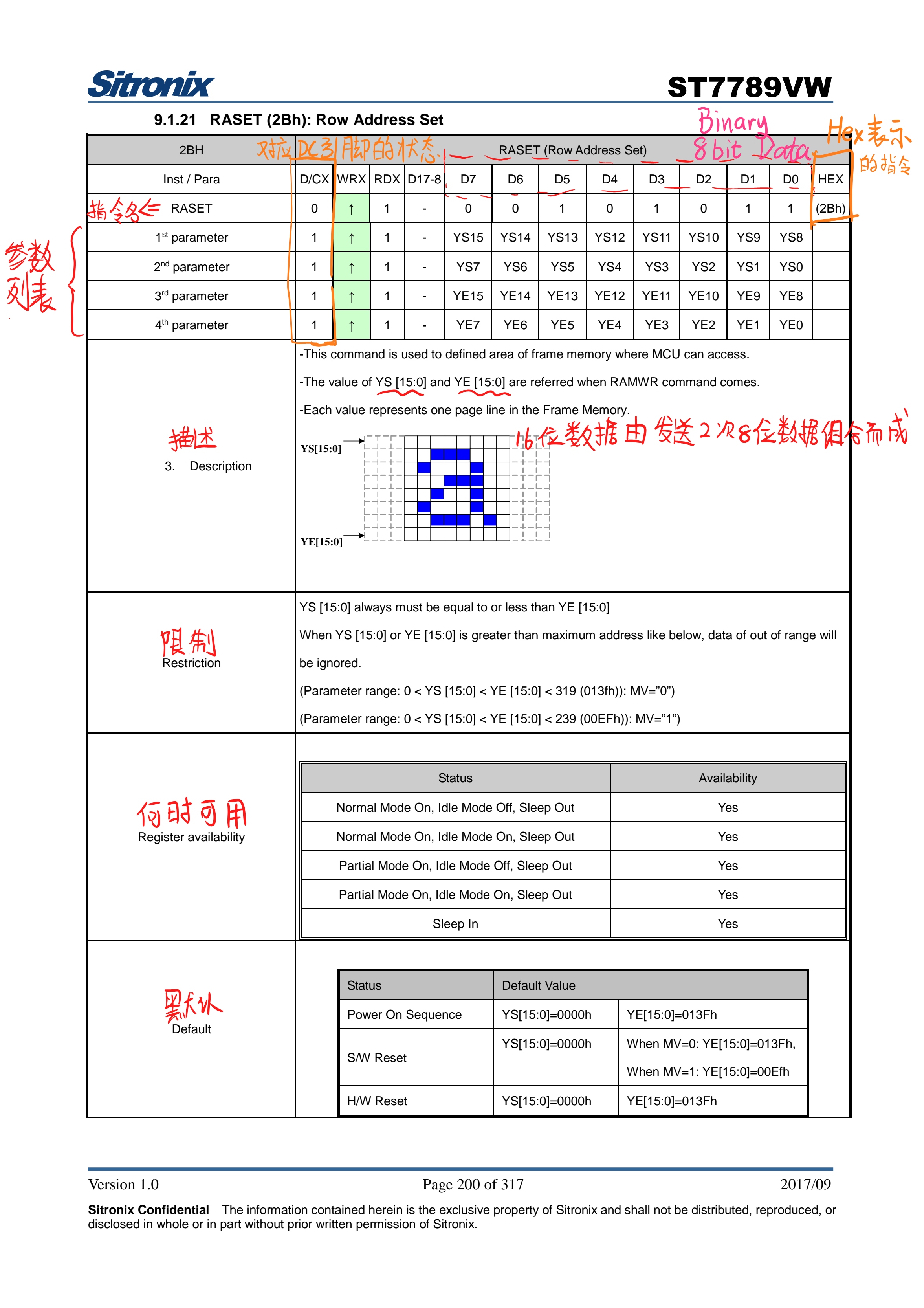
看ST7789参考手册的方法
主要还是看指令有哪些参数,指令对应的十六进制数据是什么,参数介绍是什么等等。以 RASET 指令为例:
代码实现
知道了大概的内容后,我们就来写代码罢(
首先是 simple_st7789_driver.h :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
| #ifndef SIMPLE_ST7789_DRIVER_H
#define SIMPLE_ST7789_DRIVER_H
#include <stdint.h>
#include <stdbool.h>
// ST7789 显示屏尺寸定义
#define ST7789_WIDTH 240
#define ST7789_HEIGHT 320
// RGB565 颜色定义
#define COLOR_BLACK 0x0000
#define COLOR_WHITE 0xFFFF
#define COLOR_RED 0xF800
#define COLOR_GREEN 0x07E0
#define COLOR_BLUE 0x001F
#define COLOR_YELLOW 0xFFE0
#define COLOR_CYAN 0x07FF
#define COLOR_MAGENTA 0xF81F
// ST7789 常用命令定义
#define ST7789_SWRESET 0x01 // 软件复位
#define ST7789_SLPOUT 0x11 // 退出睡眠
#define ST7789_NORON 0x13 // 正常显示模式
#define ST7789_INVOFF 0x20 // 显示反转关闭
#define ST7789_INVON 0x21 // 显示反转开启
#define ST7789_DISPOFF 0x28 // 显示关闭
#define ST7789_DISPON 0x29 // 显示开启
#define ST7789_CASET 0x2A // 列地址设置
#define ST7789_RASET 0x2B // 行地址设置
#define ST7789_RAMWR 0x2C // 内存写入
#define ST7789_MADCTL 0x36 // 内存访问控制
#define ST7789_COLMOD 0x3A // 像素格式设置
// 内存访问控制 (MADCTL) 位定义
#define ST7789_MADCTL_MY 0x80 // 行地址顺序
#define ST7789_MADCTL_MX 0x40 // 列地址顺序
#define ST7789_MADCTL_MV 0x20 // 行/列交换
#define ST7789_MADCTL_ML 0x10 // 垂直刷新顺序
#define ST7789_MADCTL_BGR 0x08 // RGB/BGR顺序
#define ST7789_MADCTL_MH 0x04 // 水平刷新顺序
// 函数声明
uint8_t simple_st7789_init(void);
uint8_t simple_st7789_deinit(void);
uint8_t simple_st7789_fill_screen(uint16_t color);
uint8_t simple_st7789_fill_rect(uint16_t x, uint16_t y, uint16_t width, uint16_t height, uint16_t color);
uint8_t simple_st7789_draw_pixel(uint16_t x, uint16_t y, uint16_t color);
uint8_t simple_st7789_set_window(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2);
uint8_t simple_st7789_send_command(uint8_t cmd);
uint8_t simple_st7789_send_data(uint8_t data);
uint8_t simple_st7789_send_data_16(uint16_t data);
// 测试函数(其实作为 Driver 不应该把这种东西放在这里,不过既然是演示就先这样吧)
uint8_t simple_st7789_test(void);
#endif // SIMPLE_ST7789_DRIVER_H
|
这些指令都可以在 ST7789 的参考手册中找到。
然后是驱动主体实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
| #include "simple_st7789_driver.h"
#include "driver_st7789_interface.h"
#include "RTE_Components.h"
#include CMSIS_device_header
// 延时函数
static void st7789_delay_ms(uint32_t ms)
{
// 简单的循环延时,基于72MHz主频
for (volatile uint32_t i = 0; i < ms * 7200; i++) {
__NOP();
}
}
/**
* @brief 发送命令到ST7789
* @param cmd 命令字节
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_send_command(uint8_t cmd)
{
uint8_t res;
// 设置DC引脚为命令模式 (低电平)
st7789_interface_cmd_data_gpio_write(0);
// 发送命令
res = st7789_interface_spi_write_cmd(&cmd, 1);
return res;
}
/**
* @brief 发送数据到ST7789
* @param data 数据字节
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_send_data(uint8_t data)
{
uint8_t res;
// 设置DC引脚为数据模式 (高电平)
st7789_interface_cmd_data_gpio_write(1);
// 发送数据
res = st7789_interface_spi_write_cmd(&data, 1);
return res;
}
/**
* @brief 发送16位数据到ST7789
* @param data 16位数据
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_send_data_16(uint16_t data)
{
uint8_t res;
uint8_t data_bytes[2];
// 高字节在前 (大端序)
data_bytes[0] = (data >> 8) & 0xFF;
data_bytes[1] = data & 0xFF;
// 设置DC引脚为数据模式 (高电平)
st7789_interface_cmd_data_gpio_write(1);
// 发送数据
res = st7789_interface_spi_write_cmd(data_bytes, 2);
return res;
}
/**
* @brief 设置显示窗口
* @param x1 起始列
* @param y1 起始行
* @param x2 结束列
* @param y2 结束行
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_set_window(uint16_t x1, uint16_t y1, uint16_t x2, uint16_t y2)
{
uint8_t res;
// 设置列地址范围 (CASET)
res = simple_st7789_send_command(ST7789_CASET);
if (res != 0) return res;
res = simple_st7789_send_data_16(x1);
if (res != 0) return res;
res = simple_st7789_send_data_16(x2);
if (res != 0) return res;
// 设置行地址范围 (RASET)
res = simple_st7789_send_command(ST7789_RASET);
if (res != 0) return res;
res = simple_st7789_send_data_16(y1);
if (res != 0) return res;
res = simple_st7789_send_data_16(y2);
if (res != 0) return res;
return 0;
}
/**
* @brief 初始化ST7789显示器
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_init(void)
{
uint8_t res;
// 1. 初始化硬件接口
res = st7789_interface_backlight_gpio_init();
if (res != 0) return 1;
res = st7789_interface_cmd_data_gpio_init();
if (res != 0) return 2;
res = st7789_interface_reset_gpio_init();
if (res != 0) return 3;
res = st7789_interface_spi_init();
if (res != 0) return 4;
// 2. 开启背光
st7789_interface_backlight_gpio_write(1);
// 3. 硬件复位
st7789_interface_reset_gpio_write(0);
st7789_delay_ms(10);
st7789_interface_reset_gpio_write(1);
st7789_delay_ms(50);
// 4. ST7789 初始化序列
// 软件复位
res = simple_st7789_send_command(ST7789_SWRESET);
if (res != 0) return 5;
st7789_delay_ms(150);
// 退出睡眠模式
res = simple_st7789_send_command(ST7789_SLPOUT);
if (res != 0) return 6;
st7789_delay_ms(10);
// 设置颜色模式为RGB565
res = simple_st7789_send_command(ST7789_COLMOD);
if (res != 0) return 7;
res = simple_st7789_send_data(0x05); // 16位RGB565
if (res != 0) return 8;
// 设置内存访问控制 (正常方向,RGB顺序)
res = simple_st7789_send_command(ST7789_MADCTL);
if (res != 0) return 9;
res = simple_st7789_send_data(0x00); // 正常方向,RGB顺序
if (res != 0) return 10;
// 反转颜色
res = simple_st7789_send_command(ST7789_INVON);
if (res != 0) return 13;
st7789_delay_ms(10);
// 正常显示模式
res = simple_st7789_send_command(ST7789_NORON);
if (res != 0) return 11;
st7789_delay_ms(10);
// 开启显示
res = simple_st7789_send_command(ST7789_DISPON);
if (res != 0) return 12;
st7789_delay_ms(100);
return 0;
}
/**
* @brief 反初始化ST7789
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_deinit(void)
{
// 关闭显示
simple_st7789_send_command(ST7789_DISPOFF);
// 关闭背光
st7789_interface_backlight_gpio_write(0);
// 反初始化硬件接口
st7789_interface_spi_deinit();
st7789_interface_reset_gpio_deinit();
st7789_interface_cmd_data_gpio_deinit();
st7789_interface_backlight_gpio_deinit();
return 0;
}
/**
* @brief 填充整个屏幕
* @param color RGB565颜色值
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_fill_screen(uint16_t color)
{
return simple_st7789_fill_rect(0, 0, ST7789_WIDTH, ST7789_HEIGHT, color);
}
/**
* @brief 填充矩形区域
* @param x 起始X坐标
* @param y 起始Y坐标
* @param width 宽度
* @param height 高度
* @param color RGB565颜色值
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_fill_rect(uint16_t x, uint16_t y, uint16_t width, uint16_t height, uint16_t color)
{
uint8_t res;
uint32_t pixel_count = width * height;
// 边界检查
if (x >= ST7789_WIDTH || y >= ST7789_HEIGHT) return 1;
if (x + width > ST7789_WIDTH) width = ST7789_WIDTH - x;
if (y + height > ST7789_HEIGHT) height = ST7789_HEIGHT - y;
// 设置绘制窗口
res = simple_st7789_set_window(x, y, x + width - 1, y + height - 1);
if (res != 0) return res;
// 开始写入像素数据
res = simple_st7789_send_command(ST7789_RAMWR);
if (res != 0) return res;
// 发送颜色数据
for (uint32_t i = 0; i < pixel_count; i++) {
res = simple_st7789_send_data_16(color);
if (res != 0) return res;
}
return 0;
}
/**
* @brief 绘制单个像素
* @param x X坐标
* @param y Y坐标
* @param color RGB565颜色值
* @return 0=成功, 其他=失败
*/
uint8_t simple_st7789_draw_pixel(uint16_t x, uint16_t y, uint16_t color)
{
return simple_st7789_fill_rect(x, y, 1, 1, color);
}
|
应该看注释能看懂吧(?),这个驱动实现了绘制矩形的功能。
20250805 Update: 屏幕默认颜色是反的,需要在初始化时开启颜色反转 (ST7789_INVON) 才能得到正确的颜色,有大佬知道这是为啥嘛 O.O ?
测试程序
main.c:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
| #include "RTE_Components.h"
#include CMSIS_device_header
#include "libs/st7789/simple_st7789_driver.h"
/**
* @brief ST7789显示测试函数
* @return 状态码
*/
uint8_t st7789_test(void)
{
uint8_t res;
// 1. 初始化ST7789驱动
res = simple_st7789_init();
if (res != 0) {
return 1;
}
// 2. 填充红色屏幕测试
res = simple_st7789_fill_screen(COLOR_RED);
if (res != 0) {
return 1;
}
for (volatile uint32_t i = 0; i < 2000000; i++) __NOP(); // 观察2秒
// 3. 矩形绘制测试
res = simple_st7789_fill_rect(60, 60, 120, 100, COLOR_BLUE);
if (res != 0) {
return 1;
}
for (volatile uint32_t i = 0; i < 2000000; i++) __NOP(); // 观察2秒
// 4. 主循环 - 6色循环显示
uint16_t colors[] = {COLOR_RED, COLOR_GREEN, COLOR_BLUE, COLOR_YELLOW, COLOR_CYAN, COLOR_MAGENTA};
uint8_t color_index = 0;
while (1) {
// 填充背景色
simple_st7789_fill_screen(colors[color_index]);
// 在中央添加对比色矩形
uint16_t contrast_color = (color_index % 2 == 0) ? COLOR_WHITE : COLOR_BLACK;
simple_st7789_fill_rect(80, 120, 80, 80, contrast_color);
color_index = (color_index + 1) % 6;
// 延时2秒
for (volatile uint32_t i = 0; i < 20000000; i++) __NOP();
}
return 0;
}
int main() {
// 启用必要的时钟
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
RCC->APB2ENR |= RCC_APB2ENR_IOPEEN;
// 开始ST7789测试
st7789_test();
for (;;) {
}
}
|
上传之后应该就能看到屏幕亮起并且开始绘制了。
总结
貌似这里的内容还是蛮多的,就说几点吧:
对于片选来说,最重要的就是保证不用到对应外设时一定要保持高电平,只在需要的时候拉低电平,用完马上上拉。
ST7789 还是一个蛮复杂的芯片,具有很多功能。这篇文章主要是拿 ST7789 来研究 SPI 通信,所以最重要的地方还是 Interface 那里,把底层操作和驱动设计隔离开。学会 SPI 大概怎么用就好了。具体以后开发的时候还是有很多复杂的东西要学习和考虑的,不过那都是以后的事情了 OwO。
调试信息的重定向挖了个坑,之后大概会填上。